著者:Fredy Martinez

これは、上級EEコースの一環として、WALL-EEという名前で行われたグループプロジェクトです。グループメンバーは、Elijah Schwartz、Juan Cano Duenas、Nayana Chandrashekara Sharma、Fredy Martinezの4名です。
既存のPythonのコードをBeaglebone Blackで使えるように修正して、自律走行する車線追従型のラジコンカーを作りました。BeagleBoneの2本のPWMピンを使って、ラジコンカーのスロットルとステアリングを調整しました。車線追従には、OpenCVを使用して車線の端を検出し、車の軌道を適切に調整しました。
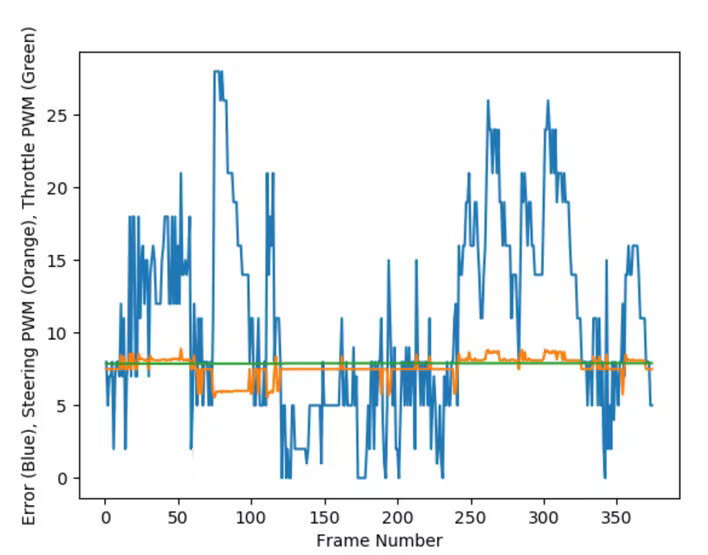
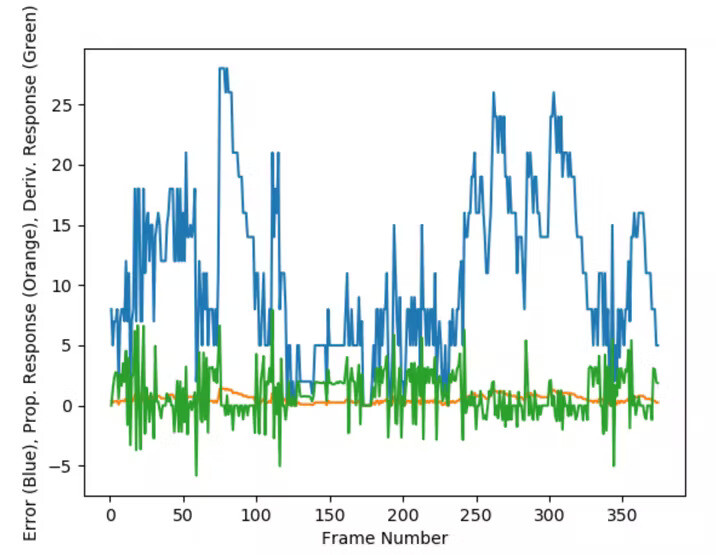
ステアリングの値を幅広く変化させるために、PD(Proportional-Derivative、比例微分)コントローラを使い、車の軌道がどれだけ軌道から外れているかに応じてPWM値を変化させ、車のステアリング角を調整するようにしました。フレームのサイズを 60 x 40ピクセルに変更して、車の反応時間を改善しました。ステアリングの過補正を最小限に抑えるために、小さな比例ゲインを使用しました。
これに加えて、いくつかのエキサイティングな新機能も追加しました!3フレームごとに、OpenCVのマスキングツールを使用して、フレーム内の赤いHSV値のみを検出しました。次に、赤のピクセル数を総ピクセル数で割って、フレーム内の赤の割合を確認しました。十分な赤が検出されると、車はそれを一時停止標識や赤信号と認識して停止し、5秒後に再始動します。これが、プロジェクトで2つの一時停止標識と赤信号を処理した方法です。
citation:
code modifed from User raja_961, Autonomous Lane-Keeping Car Using Raspberry Pi and OpenCV. Instructables. URL: https://www.instructables.com/Autonomous-Lane-Keeping-Car-Using-Raspberry-Pi-and/
"""
import cv2
import numpy as np
import math
import sys
import time
import Adafruit_BBIO.PWM as PWM
#Initialize throttle
throttlePin = "P9_16" #check reference pic to locate
PWM.start(throttlePin, 7.5, 50)
#Initialize steering
steeringPin = "P9_14" #check reference pic to locate
PWM.start(steeringPin, 7.5, 50)
#Steering info
#duty cycle < 7.5 => right
#duty cycle = 7.5 => straight
#duty cycle > 7.5 => left
#PWM.set_duty_cycle(steeringPin, duty_cycle)
#Throttle info
#duty cycle = 7.5 => stop
#duty cycle > 7.5 => forward
#do not exceed duty cycle of 8
#PWM.set_duty_cycle(throttlePin, duty_cycle)
def detect_edges(frame):
# filter for blue lane lines
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
#cv2.imshow("HSV",hsv)
lower_blue = np.array([90, 120, 0], dtype = "uint8")
upper_blue = np.array([150, 255, 255], dtype="uint8")
mask = cv2.inRange(hsv,lower_blue,upper_blue)
#cv2.imshow("mask",mask)
# detect edges
edges = cv2.Canny(mask, 50, 100)
#cv2.imshow("edges",edges)
return edges
def region_of_interest(edges):
height, width = edges.shape
mask = np.zeros_like(edges)
# only focus lower half of the screen
polygon = np.array([[
(0, height),
(0, height/2),
(width , height/2),
(width , height),
]], np.int32)
cv2.fillPoly(mask, polygon, 255)
cropped_edges = cv2.bitwise_and(edges, mask)
#cv2.imshow("roi",cropped_edges)
return cropped_edges
def detect_line_segments(cropped_edges):
rho = 1
theta = np.pi / 180
min_threshold = 10
line_segments = cv2.HoughLinesP(cropped_edges, rho, theta, min_threshold,
np.array([]), minLineLength=5, maxLineGap=150)
return line_segments
def detect_stopsign(image):
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
#red color has two ranges in hsv
lower_red1 = np.array([0, 70, 20])
upper_red1 = np.array([15, 255, 255])
lower_red2 = np.array([150, 70,20])
upper_red2 = np.array([179,255,255])
red_mask_lower = cv2.inRange(hsv, lower_red1, upper_red1)
red_mask_upper = cv2.inRange(hsv, lower_red2, upper_red2)
red_mask = red_mask_lower red_mask_upper
red = cv2.bitwise_and(image, image, mask = red_mask)
total_pixels = red.size
#if there is a significant amount of red, recognize it as a stopsign/light
red_pixels = np.count_nonzero(red)
percent = (red_pixels / total_pixels) * 100
if percent > 25:
return True
return False
def average_slope_intercept(frame, line_segments):
lane_lines = []
if line_segments is None:
print("no line segments detected")
return lane_lines
height, width,_ = frame.shape
left_fit = []
right_fit = []
boundary = 1/3
left_region_boundary = width * (1 - boundary)
right_region_boundary = width * boundary
for line_segment in line_segments:
for x1, y1, x2, y2 in line_segment:
if x1 == x2:
print("skipping vertical lines (slope = infinity")
continue
fit = np.polyfit((x1, x2), (y1, y2), 1)
slope = (y2 - y1) / (x2 - x1)
intercept = y1 - (slope * x1)
if slope < 0:
if x1 < left_region_boundary and x2 < left_region_boundary:
left_fit.append((slope, intercept))
else:
if x1 > right_region_boundary and x2 > right_region_boundary:
right_fit.append((slope, intercept))
left_fit_average = np.average(left_fit, axis=0)
if len(left_fit) > 0:
lane_lines.append(make_points(frame, left_fit_average))
right_fit_average = np.average(right_fit, axis=0)
if len(right_fit) > 0:
lane_lines.append(make_points(frame, right_fit_average))
return lane_lines
def make_points(frame, line):
height, width, _ = frame.shape
slope, intercept = line
y1 = height # bottom of the frame
y2 = int(y1 / 2) # make points from middle of the frame down
if slope == 0:
slope = 0.1
x1 = int((y1 - intercept) / slope)
x2 = int((y2 - intercept) / slope)
return [[x1, y1, x2, y2]]
def display_lines(frame, lines, line_color=(0, 255, 0), line_width=6):
line_image = np.zeros_like(frame)
if lines is not None:
for line in lines:
for x1, y1, x2, y2 in line:
cv2.line(line_image, (x1, y1), (x2, y2), line_color, line_width)
line_image = cv2.addWeighted(frame, 0.8, line_image, 1, 1)
return line_image
def display_heading_line(frame, steering_angle, line_color=(0, 0, 255), line_width=5 ):
heading_image = np.zeros_like(frame)
height, width, _ = frame.shape
steering_angle_radian = steering_angle / 180.0 * math.pi
x1 = int(width / 2)
y1 = height
x2 = int(x1 - height / 2 / math.tan(steering_angle_radian))
y2 = int(height / 2)
cv2.line(heading_image, (x1, y1), (x2, y2), line_color, line_width)
heading_image = cv2.addWeighted(frame, 0.8, heading_image, 1, 1)
return heading_image
def get_steering_angle(frame, lane_lines):
height,width,_ = frame.shape
if len(lane_lines) == 2:
_, _, left_x2, _ = lane_lines[0][0]
_, _, right_x2, _ = lane_lines[1][0]
mid = int(width / 2)
x_offset = (left_x2 right_x2) / 2 - mid
y_offset = int(height / 2)
elif len(lane_lines) == 1:
x1, _, x2, _ = lane_lines[0][0]
x_offset = x2 - x1
y_offset = int(height / 2)
elif len(lane_lines) == 0:
x_offset = 0
y_offset = int(height / 2)
angle_to_mid_radian = math.atan(x_offset / y_offset)
angle_to_mid_deg = int(angle_to_mid_radian * 180.0 / math.pi)
steering_angle = angle_to_mid_deg 90
return steering_angle
video = cv2.VideoCapture(0)
video.set(cv2.CAP_PROP_FRAME_WIDTH,320)
video.set(cv2.CAP_PROP_FRAME_HEIGHT,240)
time.sleep(1)
##fourcc = cv2.VideoWriter_fourcc(*'XVID')
##out = cv2.VideoWriter('Original15.avi',fourcc,10,(320,240))
##out2 = cv2.VideoWriter('Direction15.avi',fourcc,10,(320,240))
lastTime = 0
lastError = 0
#proportional and derivative constants
kp = 0.05
kd = kp * 0.65
#variables used for stop sign timing
i=0
j=0
frame_count = 0
frame_num = -20
#initial speed
throttle_speed = 7.88
#lists to be extracted to make graphs
frames = []
errors = []
steering_pwms = []
throttle_pwms = []
p_response = []
d_response = []
while frame_count < 500:
ret,frame = video.read()
i = 1
frames.append(i)
frame = cv2.flip(frame,-1)
frame = cv2.resize(frame, (60, 40)) #resize camera feed
frame_count = 1
#set camera
#cv2.imshow("original",frame)
edges = detect_edges(frame)
roi = region_of_interest(edges)
line_segments = detect_line_segments(roi)
lane_lines = average_slope_intercept(frame,line_segments)
lane_lines_image = display_lines(frame,lane_lines)
steering_angle = get_steering_angle(frame, lane_lines)
heading_image = display_heading_line(lane_lines_image,steering_angle)
cv2.imshow("heading line",heading_image)
#set throttle
PWM.set_duty_cycle(throttlePin, throttle_speed)
#detect stop sign every 3 frames and past 20 frames from last stop
if i % 3 == 0 and i >= frame_num 20:
stop = detect_stopsign(frame)
if stop == True:
throttle_speed = 7.905 #give speed boost after stop
print("stopped")
frame_num = i
j =1
PWM.set_duty_cycle(throttlePin, 7.5)
time.sleep(5)
if j == 3:
break #end script after three stops
PWM.set_duty_cycle(throttlePin, throttle_speed)
print("started")
#PD controller
now = time.time()
dt = now - lastTime
deviation = steering_angle - 90
error = abs(deviation)
errors.append(error)
steering = 0
derivative = kd * (error - lastError) / dt
proportional = kp * error
PD = int(steering derivative proportional)
steering = abs(PD)
print("steering: " str(steering))
p_response.append(proportional)
d_response.append(derivative)
#steering logic using PD values
new_val = 7.5
if deviation < 9 and deviation > -9:
print("Not Steering")
print("Deviation: " str(deviation))
new_val = 7.5
deviation = 0
error = 0
PWM.set_duty_cycle(steeringPin, 7.5)
elif deviation > 15:
print("Steering Right")
print("Deviation: " str(deviation))
new_val = 6 - steering/18
print("right val: " str(new_val))
PWM.set_duty_cycle(steeringPin, new_val)
elif deviation > 9:
print("Steering right")
print("Deviation: " str(deviation))
new_val = 6 - steering/20
print("right val: " str(new_val))
PWM.set_duty_cycle(steeringPin, new_val)
elif deviation < -25:
print("Steering Left")
print("Deviation: " str(deviation))
new_val = 8.6 steering/13
print("left val: " str(new_val))
throttle_speed = 7.91
PWM.set_duty_cycle(throttlePin, throttle_speed)
PWM.set_duty_cycle(steeringPin, new_val)
elif deviation < -20:
print("Steering Left")
print("Deviation: " str(deviation))
new_val = 8.6 steering/13
print("left val: " str(new_val))
PWM.set_duty_cycle(steeringPin, new_val)
elif deviation < -9:
print("Steering Left")
print("Deviation: " str(deviation))
new_val = 8.1 steering/15
print("left val: " str(new_val))
PWM.set_duty_cycle(steeringPin, new_val)
#append lists
steering_pwms.append(new_val)
throttle_pwms.append(throttle_speed)
lastError = error
lastTime = time.time()
# out.write(frame)
# out2.write(heading_image)
key = cv2.waitKey(1)
if key == 27:
break
#extract lists to separate file for analysis
with open("graph_data.txt", "w") as f:
f.write("frames: \n")
for item in frames:
f.write("%s, " % item)
f.write("\nerrors: \n")
for item in errors:
f.write("%s, " % item)
f.write("\nsteering pwms: \n")
for item in steering_pwms:
f.write("%s," % item)
f.write("\nthrottle pwms: \n")
for item in throttle_pwms:
f.write("%s, " % item)
f.write("\np response: \n")
for item in p_response:
f.write("%s, " % item)
f.write("\nd response: \n")
for item in d_response:
f.write("%s, " % item)
#close video feed and stop car
video.release()
##out.release()
##out2.release()
cv2.destroyAllWindows()
PWM.set_duty_cycle(throttlePin, 7.5)
PWM.set_duty_cycle(steeringPin, 7.5)
#close pins when finished
PWM.stop("P9_16")
PWM.stop("P9_14")
PWM.cleanup()


主要部品とコンポーネント

- 1597-1007-ND
- 2820-102110420-ND