步進馬達 (Stepper Motor) 驅動技術:全步級 (Full-Step)、半步級 (Half-Step) 和微步級 (Micro-step) 驅動模式
本文將介紹「微步級驅動 」。

微步級驅動
原理
微步級驅動是一種先進的方法,允許馬達在全步之間旋轉到多個中間位置,從而顯著提高位置解析度並實現更平穩的低速旋轉。這是透過將每個全步細分為一系列等距微步來實現的。
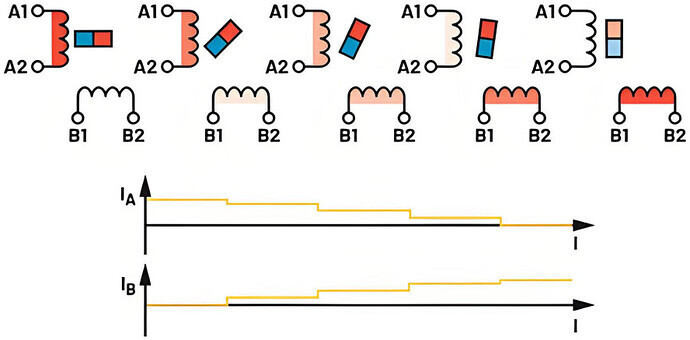
上圖展示了馬達在微步級驅動過程中的不同狀態,包括線圈 A1 - A2 和 B1 - B2 的通電以及相應的轉子位置變化,直觀地呈現了馬達在微步控制下的工作過程。
下圖是位置過衝/振盪圖,顯示了不同步進模式下轉子位置的變化。全步級驅動模式存在明顯的過衝和振盪,半步級驅動模式改善了這一問題,而微步級驅動模式則表現出更平滑的位置變化,幾乎沒有明顯的過衝或振盪,進一步說明了微步級驅動模式在提升電機性能方面的優勢。
工作原理和技術實現
微步級驅動不僅透過切換相的通斷,還透過對相施加不同的電流值來實現最佳運行行為。
二相由相差 90° 的近似正弦波控制。一個全步被分成更小的單位,稱為微步。微步進解析度是指將一個全步分割成的中間位置的數量。
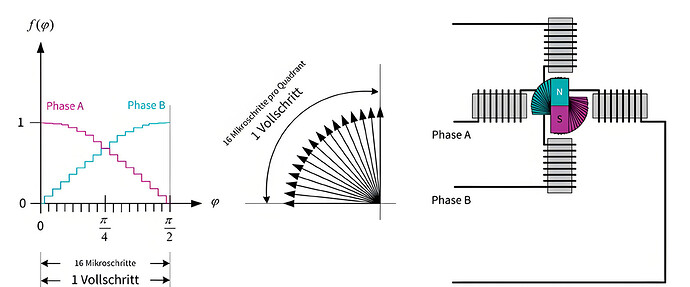
左圖:二相(A 相和 B 相)的電流變化曲線,呈現近似正弦波,相位差為 90°。圖中標記了 16 個微步和 1 個全步,表示透過控制二相電流的變化,將一個全步細分為 16 個微步。
中圖:角度圖,顯示將 1 個全步細分為 16 個微步。
右圖:展示了微步控制在實際馬達結構中的應用,展示如何透過精確控制二相線圈中的電流,實現轉子以更小的步距角進行精確旋轉。
性能優勢與局限性
- 優點:
更高的微步解析度可使相電流的理論正弦波更加平滑。
由於與全步運行相比,運動距離更小,瞬態效應顯著降低。- 局限性:
實際上,僅指定正弦波設定值不足以獲得正弦波相電流。開關電感和其他幹擾效應需要採取進一步措施才能保持非常平滑的運作。
相關產品
- TMC2240 和 TMC5240
TMC2240 和 TMC5240 是整合式運動控制器、高性能二相步進馬達驅動器 IC。 8 點運動斜坡函數簡化了系統架構,使用戶能夠在所需的位置和運動曲線輕鬆編程。 - TMC2160 和 TMC5160
TMC2160 和 TMC5160 是高功率二相步進馬達驅動器 IC,支援 256 微步解析度和 MicroPlyer 微步插值。它們採用多種 Trinamic 技術優化驅動器性能,適用於從電池供電系統到高壓工業應用的各種場景。 - TMC2300
TMC2300 是一款專為二相、電池供電步進馬達設計的低電壓驅動器,具有 256 微步解析度以及 CoolStep、StealthChop2、StallGuard4 和 SpreadCycle 等功能。