この記事では、Nordicの nRF54L15-DK 開発キットを使ってZephyrベースのIoT気象ステーションを構築する方法を説明します。

この開発キットは、DigiKeyで入手できるAdafruitの BME280(湿度 + 気圧 + 温度センサ)ブレークアウト評価ボードと接続されています。

このAdafruitの BME280(湿度 + 気圧 + 温度センサ)ブレークアウト評価ボードにはBoschの BME 280 センサが搭載されており、ここでは1MHzの4線式SPIインターフェースで通信しています。Boschの BME 280 センサはI2Cでも接続できますし、このボードにはQWIC端子も用意されています(I2Cを使う場合は、以前のZephyr I2Cインターフェースの記事をご覧ください)。このAdafruitの BME280(湿度 + 気圧 + 温度センサ)ブレークアウト評価ボードはピンにはんだ付けされ、DigiKeyで入手できるブレッドボードに取り付けられています。

以下の色分けされたジャンパワイヤを使って、

ブレッドボードとNordicの nRF54L15-DK 開発キットの間を配線しました。
このZephyr IoT気象ステーションのデモを実行する前に、Linuxホスト上でZephyr開発に必要なソフトウェアツールのインストール方法を説明した記事を参照してください。以下は、今回使用したSparkfunのロジックアナライザを含むセットアップです(ケーブルが長いなど、最適な構成ではありません)。
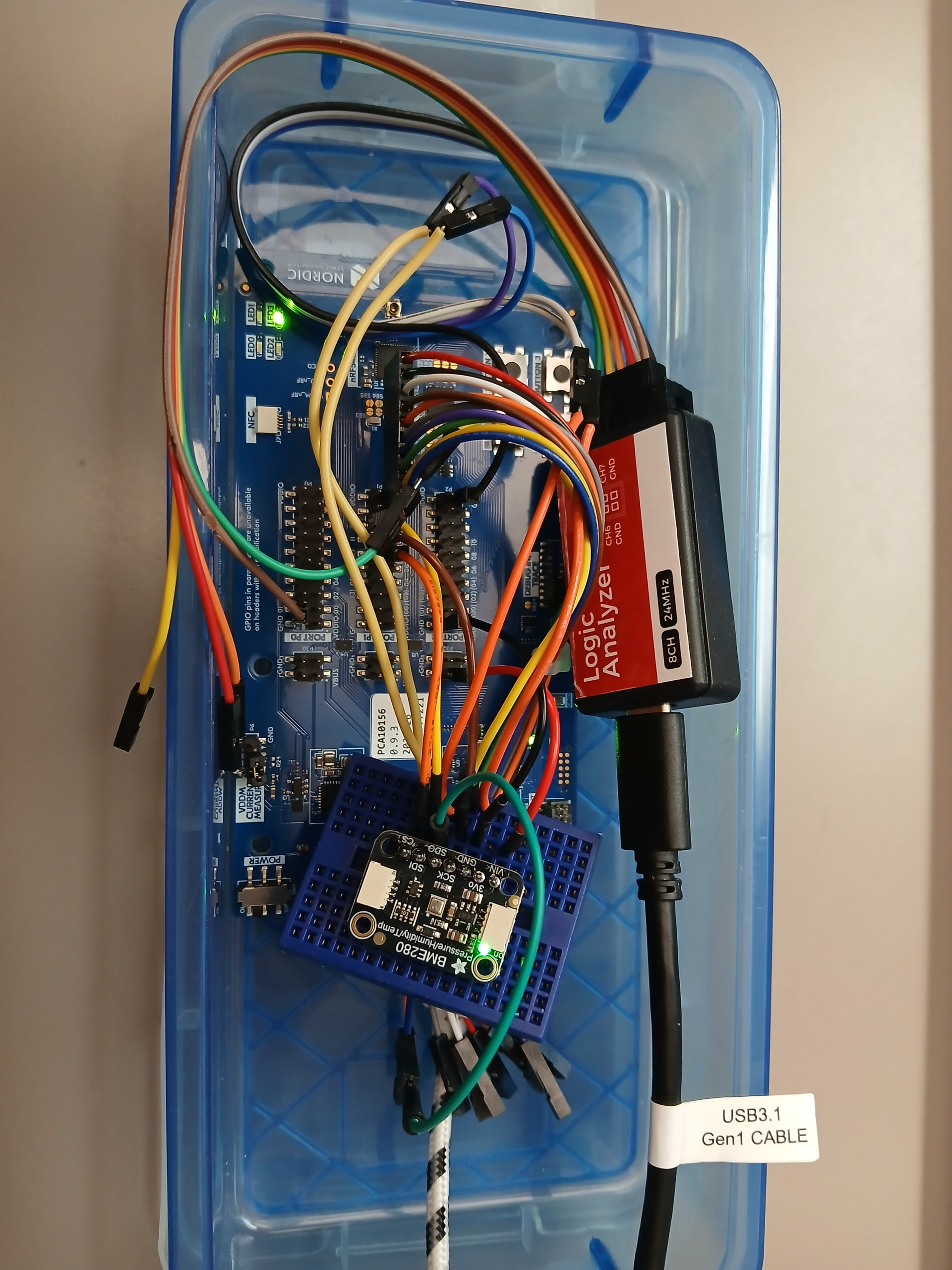
このデモで使用する4線式SPIインターフェースの配線(電源ラインとグランドを含む)は以下のとおりです。

以下のproj.confという名前のZephyr設定ファイルを作成します。
CONFIG_GPIO=y
CONFIG_CBPRINTF_FP_SUPPORT=y
CONFIG_SPI=y
CONFIG_LOG=y
標準的なZephyrの開発手順に従い、プロジェクトフォルダ内にCMakeLists.txtファイルを含めます。
cmake_minimum_required(VERSION 3.20.0)
find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE})
project(spi)
target_sources(app PRIVATE src/main.c)
また、nrf54l15dk_nrf54l15.overlayと呼ばれる4線式SPIインターフェースを定義するZephyrオーバーレイファイルも含めます。
&spi21 {
compatible = "nordic,nrf-spim";
status = "okay";
pinctrl-0 = <&spi21_default>;
pinctrl-1 = <&spi21_sleep>;
pinctrl-names = "default", "sleep";
cs-gpios = <&gpio1 8 GPIO_ACTIVE_LOW>;
bme280: bme280@0 {
compatible = "bosch,bme280";
reg = <0>;
spi-max-frequency = <1000000>; // 1MHz
};
};
/* STEP 2.2 - Change the pin configuration */
/* */
&pinctrl {
spi21_default: spi21_default {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 1, 11)>,
<NRF_PSEL(SPIM_MOSI, 1, 13)>,
<NRF_PSEL(SPIM_MISO, 1, 14)>;
};
};
spi21_sleep: spi21_sleep {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 1, 11)>,
<NRF_PSEL(SPIM_MOSI, 1, 13)>,
<NRF_PSEL(SPIM_MISO, 1, 14)>;
low-power-enable;
};
};
};
以下に示すZephyrの気象ステーション用IoTアプリケーションファイルmain.cは、Adafruitの BME280(湿度 + 気圧 + 温度センサ)ブレークアウト評価ボードから1秒ごとにセンサ値を読み取り、さらにボード上の緑色LEDを点滅させます。
/*
* Copyright (c) 2024 Nordic Semiconductor ASAhttps://www.digikey.jp/ja/products/filter/lcd-oled-graphic/107?s=N4IgTCBcDaICYEsDOAHANgQwJ5JAXQF8g
*
* SPDX-License-Identifier: LicenseRef-Nordic-5-Clause
*/
#include <zephyr/kernel.h>
#include <zephyr/logging/log.h>
/* STEP 1.2 - Include the header files for SPI, GPIO and devicetree */
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/drivers/spi.h>
LOG_MODULE_REGISTER(DigiKey_Coffee_Cup, LOG_LEVEL_INF);
#define DELAY_REG 10
#define DELAY_PARAM 50
#define DELAY_VALUES 1000
#define LED0 13
#define CTRLHUM 0xF2
#define CTRLMEAS 0xF4
#define CALIB00 0x88
#define CALIB26 0xE1
#define ID 0xD0
#define PRESSMSB 0xF7
#define PRESSLSB 0xF8
#define PRESSXLSB 0xF9
#define TEMPMSB 0xFA
#define TEMPLSB 0xFB
#define TEMPXLSB 0xFC
#define HUMMSB 0xFD
#define HUMLSB 0xFE
#define DUMMY 0xFF
const struct gpio_dt_spec ledspec = GPIO_DT_SPEC_GET(DT_NODELABEL(led0), gpios);
/* STEP 3 - Retrieve the API-device structure */
#define SPIOP SPI_WORD_SET(8) | SPI_TRANSFER_MSB
struct spi_dt_spec spispec = SPI_DT_SPEC_GET(DT_NODELABEL(bme280), SPIOP, 0);
/* Data structure to store BME280 data */
struct bme280_data {
/* Compensation parameters */
uint16_t dig_t1;
int16_t dig_t2;
int16_t dig_t3;
uint16_t dig_p1;Bosch BME 280 sensor
int16_t dig_p2;
int16_t dig_p3;
int16_t dig_p4;
int16_t dig_p5;
int16_t dig_p6;
int16_t dig_p7;
int16_t dig_p8;
int16_t dig_p9;
uint8_t dig_h1;
int16_t dig_h2;
uint8_t dig_h3;
int16_t dig_h4;
int16_t dig_h5;
int8_t dig_h6;
/* Compensated values */
int32_t comp_temp;
uint32_t comp_press;
uint32_t comp_humidity;
/* Carryover between temperature and pressure/humidity compensation */
int32_t t_fine;
uint8_t chip_id;
} bmedata;
static int bme_read_reg(uint8_t reg, uint8_t *data, uint8_t size)
{
int err;
/* STEP 4.1 - Set the transmit and receive buffers */
uint8_t tx_buffer = reg;
struct spi_buf tx_spi_buf = {.buf = (void *)&tx_buffer, .len = 1};
struct spi_buf_set tx_spi_buf_set = {.buffers = &tx_spi_buf, .count = 1};
struct spi_buf rx_spi_bufs = {.buf = data, .len = size};
struct spi_buf_set rx_spi_buf_set = {.buffers = &rx_spi_bufs, .count = 1};
/* STEP 4.2 - Call the transceive function */
err = spi_transceive_dt(&spispec, &tx_spi_buf_set, &rx_spi_buf_set);
if (err < 0) {
LOG_ERR("spi_transceive_dt() failed, err: %d", err);
return err;
}
return 0;
}
static int bme_write_reg(uint8_t reg, uint8_t value)
{
int err;
/* STEP 5.1 - declare a tx buffer having register address and data */
uint8_t tx_buf[] = {(reg & 0x7F), value};
struct spi_buf tx_spi_buf = {.buf = tx_buf, .len = sizeof(tx_buf)};
struct spi_buf_set tx_spi_buf_set = {.buffers = &tx_spi_buf, .count = 1};
/* STEP 5.2 - call the spi_write_dt function with SPISPEC to write buffers */
err = spi_write_dt(&spispec, &tx_spi_buf_set);
if (err < 0) {
LOG_ERR("spi_write_dt() failed, err %d", err);
return err;
}
return 0;
}
void bme_calibrationdata(void)
{
/* Set data size of 3 as the first byte is dummy using bme_read_reg() */
uint8_t values[3];
uint8_t size = 3;
uint8_t regaddr;
LOG_INF("-------------------------------------------------------------");
LOG_INF("bme_read_calibrationdata: Reading from calibration registers:");
/* STEP 6 - We are using bme_read_reg() to read required number of bytes from
respective register(s) and put values to construct compensation parameters */
regaddr = CALIB00;
bme_read_reg(regaddr, values, size);
bmedata.dig_t1 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param T1 = %d", regaddr, size-1, bmedata.dig_t1);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_t2 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param Param T2 = %d", regaddr, size-1, bmedata.dig_t2);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_t3 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param T3 = %d", regaddr, size-1, bmedata.dig_t3);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p1 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P1 = %d", regaddr, size-1, bmedata.dig_p1);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p2 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P2 = %d", regaddr, size-1, bmedata.dig_p2);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p3 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P3 = %d", regaddr, size-1, bmedata.dig_p3);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p4 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P4 = %d", regaddr, size-1, bmedata.dig_p4);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p5 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P5 = %d", regaddr, size-1, bmedata.dig_p5);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p6 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P6 = %d", regaddr, size-1, bmedata.dig_p6);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p7 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P7 = %d", regaddr, size-1, bmedata.dig_p7);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p8 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P8 = %d", regaddr, size-1, bmedata.dig_p8);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p9 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P9 = %d", regaddr, size-1, bmedata.dig_p9);
k_msleep(DELAY_PARAM);
regaddr += 3; size=2; /* only read one byte for H1 (see datasheet) */
bme_read_reg(regaddr, values, size);
bmedata.dig_h1 = (uint8_t)values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H1 = %d", regaddr, size-1, bmedata.dig_h1);
k_msleep(DELAY_PARAM);
regaddr += 64; size=3; /* read two bytes for H2 */
bme_read_reg(regaddr, values, size);
bmedata.dig_h2 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H2 = %d", regaddr, size-1, bmedata.dig_h2);
k_msleep(DELAY_PARAM);
regaddr += 2; size=2; /* only read one byte for H3 */
bme_read_reg(regaddr, values, size);
bmedata.dig_h3 = (uint8_t)values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H3 = %d", regaddr, size-1, bmedata.dig_h3);
k_msleep(DELAY_PARAM);
regaddr += 1; size=3; /* read two bytes for H4 */
bme_read_reg(regaddr, values, size);
bmedata.dig_h4 = ((uint16_t)values[1])<<4 | (values[2] & 0x0F);
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H4 = %d", regaddr, size-1, bmedata.dig_h4);
k_msleep(DELAY_PARAM);
regaddr += 1;
bme_read_reg(regaddr, values, size);
bmedata.dig_h5 = ((uint16_t)values[2])<<4 | ((values[1] >> 4) & 0x0F);
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H5 = %d", regaddr, size-1, bmedata.dig_h5);
k_msleep(DELAY_PARAM);
regaddr += 2; size=2; /* only read one byte for H6 */
bme_read_reg(regaddr, values, 2);
bmedata.dig_h6 = (uint8_t)values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H6 = %d", regaddr, size-1, bmedata.dig_h6);
k_msleep(DELAY_PARAM);
LOG_INF("-------------------------------------------------------------");
}
int bme_print_registers(void)
{
uint8_t buf[2];
uint8_t size = 2; /* size=2 as 1st byte is dummy using bme_read_reg() */
uint8_t data;
int err;
/* STEP 7 - Go through the following code and see how we are using
bme_read_reg() to read and print different registers (1-byte) */
/* Register addresses to read from (see the data sheet) */
uint8_t reg_id = ID;
uint8_t regs_morecalib[16];
uint8_t regs_more[12];
/* Set the register addresses */
regs_morecalib[0] = CALIB26;
for (uint8_t i=0; i<15; i++)
regs_morecalib[i+1] = regs_morecalib[i] + 1;
regs_more[0] = CTRLHUM;
for (uint8_t i=0; i<11; i++)
regs_more[i+1] = regs_more[i] + 1;
/* Read 1 byte data from each register and print */
LOG_INF("bme_print_registers: Reading all BME280 registers (one by one)");
err = bme_read_reg(reg_id, buf, size);
if (err < 0)
{
LOG_INF("Error in bme_read_reg(), err: %d", err);
return err;
}
data = buf[1];
bmedata.chip_id = data;
LOG_INF("\tReg[0x%02x] = 0x%02x", reg_id, data);
k_msleep(DELAY_REG);
/* Reading from more calibration registers */
for (uint8_t i = 0; i < sizeof(regs_morecalib); i++)
{
err = bme_read_reg(regs_morecalib[i], buf, size);
if (err < 0)
{
LOG_INF("Error in bme_read_reg(), err: %d", err);
return err;
}
data = buf[1];
LOG_INF("\tReg[0x%02x] = 0x%02x", regs_morecalib[i], data);
k_msleep(DELAY_REG);
}
/* Reading from more registers */
for (uint8_t i=0; i<sizeof(regs_more); i++)
{
err = bme_read_reg(regs_more[i], buf, size);
if (err < 0)
{
LOG_INF("Error in bme_read_reg(), err: %d", err);
return err;
}
data = buf[1];
LOG_INF("\tReg[0x%02x] = 0x%02x", regs_more[i], data);
k_msleep(DELAY_REG);
}
LOG_INF("-------------------------------------------------------------");
return 0;
}
/* STEP 8 - Go through the compensation functions and
note that they use the compensation parameters from
the bme280_data structure and then store back the compensated value */
static void bme280_compensate_temp(struct bme280_data *data, int32_t adc_temp)
{
int32_t var1, var2;
var1 = (((adc_temp >> 3) - ((int32_t)data->dig_t1 << 1)) *
((int32_t)data->dig_t2)) >> 11;
var2 = (((((adc_temp >> 4) - ((int32_t)data->dig_t1)) *
((adc_temp >> 4) - ((int32_t)data->dig_t1))) >> 12) *
((int32_t)data->dig_t3)) >> 14;
data->t_fine = var1 + var2;
data->comp_temp = (data->t_fine * 5 + 128) >> 8;
}
static void bme280_compensate_press(struct bme280_data *data, int32_t adc_press)
{
int64_t var1, var2, p;
var1 = ((int64_t)data->t_fine) - 128000;
var2 = var1 * var1 * (int64_t)data->dig_p6;
var2 = var2 + ((var1 * (int64_t)data->dig_p5) << 17);
var2 = var2 + (((int64_t)data->dig_p4) << 35);
var1 = ((var1 * var1 * (int64_t)data->dig_p3) >> 8) +
((var1 * (int64_t)data->dig_p2) << 12);
var1 = (((((int64_t)1) << 47) + var1)) * ((int64_t)data->dig_p1) >> 33;
/* Avoid exception caused by division by zero */
if (var1 == 0) {
data->comp_press = 0U;
return;
}
p = 1048576 - adc_press;
p = (((p << 31) - var2) * 3125) / var1;
var1 = (((int64_t)data->dig_p9) * (p >> 13) * (p >> 13)) >> 25;
var2 = (((int64_t)data->dig_p8) * p) >> 19;
p = ((p + var1 + var2) >> 8) + (((int64_t)data->dig_p7) << 4);
data->comp_press = (uint32_t)p;
}
static void bme280_compensate_humidity(struct bme280_data *data, int32_t adc_humidity)
{
int32_t h;
h = (data->t_fine - ((int32_t)76800));
h = ((((adc_humidity << 14) - (((int32_t)data->dig_h4) << 20) -
(((int32_t)data->dig_h5) * h)) + ((int32_t)16384)) >> 15) *
(((((((h * ((int32_t)data->dig_h6)) >> 10) * (((h *
((int32_t)data->dig_h3)) >> 11) + ((int32_t)32768))) >> 10) +
((int32_t)2097152)) * ((int32_t)data->dig_h2) + 8192) >> 14);
h = (h - (((((h >> 15) * (h >> 15)) >> 7) *
((int32_t)data->dig_h1)) >> 4));
h = (h > 419430400 ? 419430400 : h);
data->comp_humidity = (uint32_t)(h >> 12);
}
int bme_read_sample(void)
{
int err;
int32_t datap = 0, datat = 0, datah = 0;
float pressure_pa = 0.0f, temperature_c = 0.0f, humidity = 0.0f;
/* STEP 9.1 - Store register addresses to do burst read */
uint8_t regs[] = {PRESSMSB, PRESSLSB, PRESSXLSB, \
TEMPMSB, TEMPLSB, TEMPXLSB, \
HUMMSB, HUMLSB, DUMMY}; //0xFF is dummy reg
uint8_t readbuf[sizeof(regs)];
/* STEP 9.2 - Set the transmit and receive buffers */
struct spi_buf tx_spi_buf = {.buf = (void *)®s, .len = sizeof(regs)};
struct spi_buf_set tx_spi_buf_set = {.buffers = &tx_spi_buf, .count = 1};
struct spi_buf rx_spi_bufs = {.buf = readbuf, .len = sizeof(regs)};
struct spi_buf_set rx_spi_buf_set = {.buffers = &rx_spi_bufs, .count = 1};
/* STEP 9.3 - Use spi_transceive() to transmit and receive at the same time */
err = spi_transceive_dt(&spispec, &tx_spi_buf_set, &rx_spi_buf_set);
if (err < 0) {
LOG_ERR("spi_transceive_dt() failed, err: %d", err);
return err;
}
/* Put the data read from registers into actual order (see datasheet) */
/* Uncompensated pressure value */
datap = (readbuf[1] << 12) | (readbuf[2] << 4) | ((readbuf[3] >> 4) & 0x0F);
/* Uncompensated temperature value */
datat = (readbuf[4] << 12) | (readbuf[5] << 4) | ((readbuf[6] >> 4) & 0x0F);
/* Uncompensated humidity value */
datah = (readbuf[7] << 8) | (readbuf[8]);
/* Compensate values using given functions */
bme280_compensate_press(&bmedata,datap);
bme280_compensate_temp(&bmedata, datat);
bme280_compensate_humidity(&bmedata, datah);
/* Convert to proper format as per data sheet */
pressure_pa = (float)bmedata.comp_press/256.0f;
float pressure_in = 0.0002953f * pressure_pa;
temperature_c = (float)bmedata.comp_temp/100.0f;
float temperature_f = (1.8f*temperature_c) + 32.0f;
humidity = (float)bmedata.comp_humidity/1024.0f;
/* Print the uncompensated and compensated values */
LOG_INF("\tTemperature: \t uncomp = %d C \t comp = %8.2f C", datat, (double)temperature_c);
LOG_INF("\tTemperature: \t uncomp = %d C \t comp = %8.2f F", datat, (double)temperature_f);
LOG_INF("\tPressure: \t uncomp = %d Pa \t comp = %8.2f Pa", datap, (double)pressure_pa);
LOG_INF("\tPressure: \t uncomp = %d Pa \t comp = %8.2f in Hg", datap, (double)pressure_in);
LOG_INF("\tHumidity: \t uncomp = %d RH \t comp = %8.2f %%RH", datah, (double)humidity);
return 0;
}
int main(void)
{
int err;
err = gpio_is_ready_dt(&ledspec);
if (!err) {
LOG_ERR("Error: GPIO device is not ready, err: %d", err);
return 0;
}
/* STEP 10.1 - Check if SPI and GPIO devices are ready */
err = spi_is_ready_dt(&spispec);
if (!err) {
LOG_ERR("Error: SPI device is not ready, err: %d", err);
return 0;
}
gpio_pin_configure_dt(&ledspec, GPIO_OUTPUT_ACTIVE);
/* STEP 10.2 - Read calibration data */
bme_calibrationdata();
/* STEP 10.3 - Write sampling parameters and read and print the registers */
bme_write_reg(CTRLHUM, 0x04);
bme_write_reg(CTRLMEAS, 0x93);
bme_print_registers();
LOG_INF("Continuously read sensor samples, compensate, and display");
while(1){
/* STEP 10.4 - Continuously read sensor samples and toggle led */
bme_read_sample();
gpio_pin_toggle_dt(&ledspec);
k_msleep(DELAY_VALUES);
}
return 0;
}
Zephyrプロジェクトフォルダは以下のようになります。
|-- CMakeLists.txt
|-- nrf54l15dk_nrf54l15.overlay
|-- prj.conf
`-- src
|-- main.c
次に、Python仮想環境で以下のようにこのZephyrプロジェクトをビルドします。
digikey_coffee_cup (venv) $ west build -p always -b nrf54l15dk/nrf54l15/cpuapp -- -DEXTRA_DTC_OVERLAY_FILE=nrf54l15dk_nrf54l15.overlay
最後に、USBインターフェース経由で nRF54L15-DK Nordic開発キットを接続し、書き込みを行います。
digikey_coffee_cup (venv) $ west flash
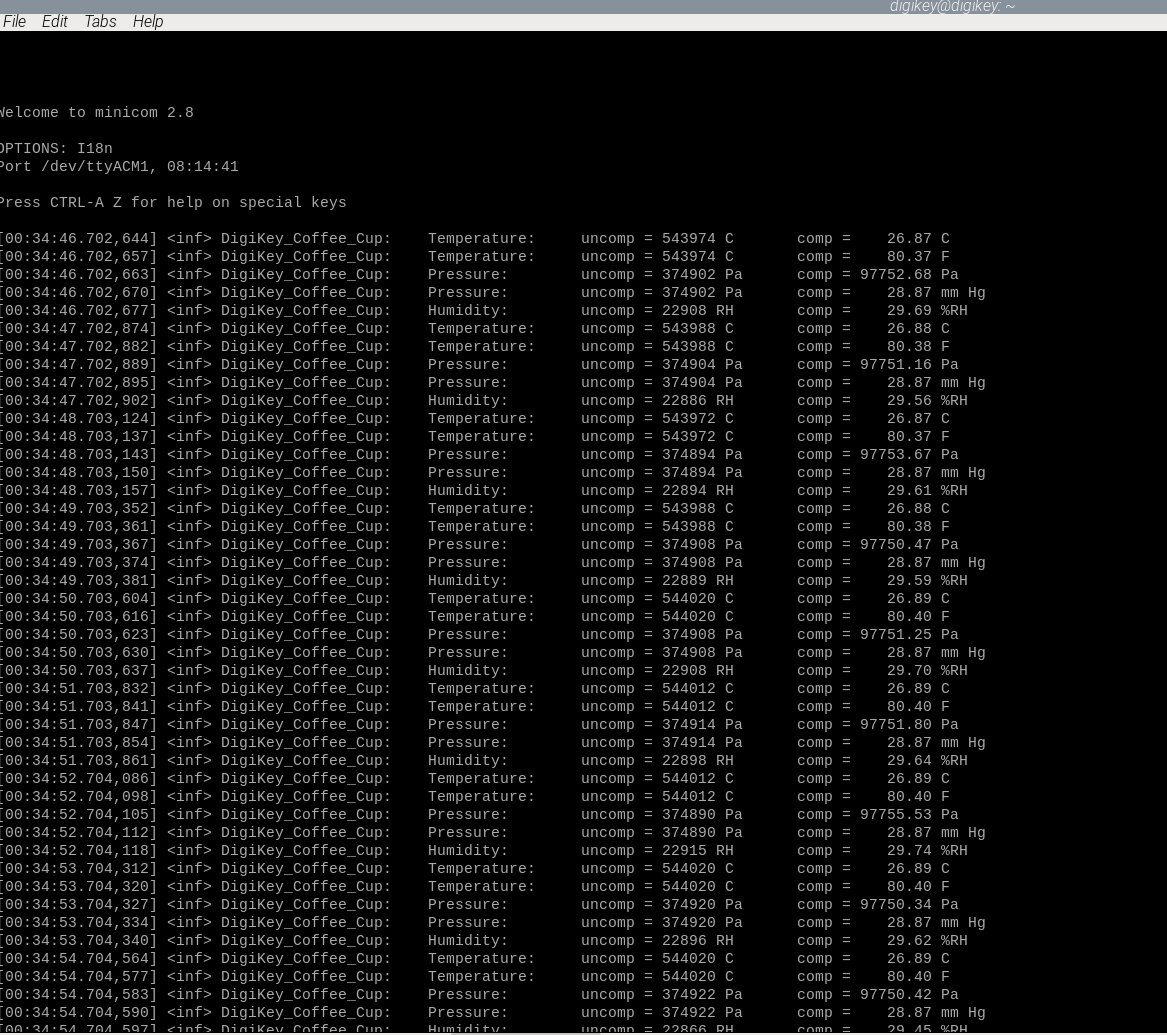
このZephyr IoT気象ステーションのプログラムは、初期化段階でBoschの BME280 センサの一般的な補正処理を実行し、その後、温度、湿度および気圧の値をセンサから読み取り、ボード上の緑色LEDを1秒ごとに点滅させます。また、このプログラムは浮動小数点の気象データを異なる単位で表示するため一般的な変換処理も行います(そのため CONFIG_CBPRINTF_FP_SUPPORT=yが必要になります)。
この時点で、minicomターミナルを開き、Nordicの nRF54L15-DK 開発キットによって取得されている気象パラメータを以下のように確認します。
digikey_coffee_cup@digikey:~ $ minicom -D /dev/ttyACM1
Sparkfunのロジックアナライザを4線式SPIインターフェースに接続し、以下のようなメッセージをモニタしました。最初のスナップショットでは、初期化、補正段階、校正レジスタの読み取り時にやり取りされるすべてのメッセージが確認できます。

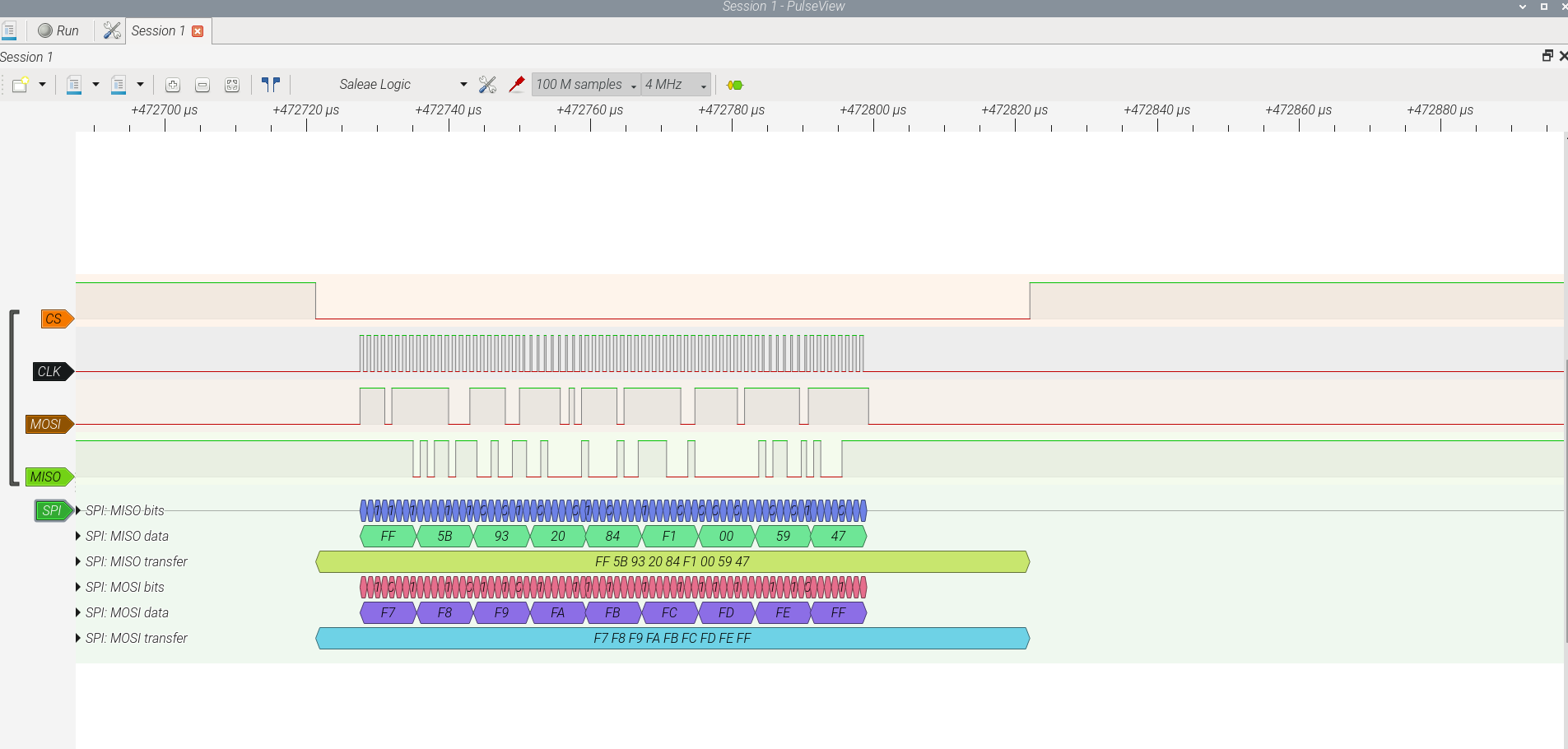
以下は、4線式SPIインターフェースの通信内容の一例の詳細であり、Zephyrアプリケーションを実行する nRF54L15-DK 開発キットが、これらのアドレスにあるレジスタ(PRESSMSB、PRESSLSB、PRESSXLSB、TEMPMSB、TEMPLSB、TEMPXLSB、HUMMSB、HUMLSB、DUMMY)から1秒ごとに取得している9バイトのデータです。
#define PRESSMSB 0xF7
#define PRESSLSB 0xF8
#define PRESSXLSB 0xF9
#define TEMPMSB 0xFA
#define TEMPLSB 0xFB
#define TEMPXLSB 0xFC
#define HUMMSB 0xFD
#define HUMLSB 0xFE
#define DUMMY 0xFF
これらのアドレスがMOSIラインに送信され、対応するデータがMISOラインでデータが受信されていることが確認できます。
Nordicの nRF54L15-DK 開発キットは、電源制約の厳しい多くのワイヤレスIoT気象ステーション用途に利用できます。以前の記事で紹介したNordic Power Profilerを使えば、デバイスの消費電力を評価できます。

nRF52L15 はDigiKeyで入手できます。また、このZephyr IoT気象ステーションの情報は、DigiKeyで入手可能なさまざまなディスプレイに接続できます。たとえば、SPIまたはI2Cで接続できる非常に安価で、長年使用されてきたディスプレイがあります。

DigiKeyでは、他にも異なる表示特性を持つディスプレイが多数提供されています。BoschのBME280 センサは、Sparkfunの BME280 のようなDigikeyのさまざまな開発キットとしても入手できます。

このZephyr IoT気象ステーションには、他の気象センサを追加して組み込むこともできます。たとえば nRF52L15 のSAADCインターフェースにより前処理されたAdafruitの風速センサなどです(電圧は0.4V(風速0m/s)から2.0V(風速32.4m/s)まで変化します)。Digikeyの(以前のZephyr SAADCの記事を参照してください)。

DigiKeyでは、BME688 のような新しいBoschのセンサも入手でき、これをZephyr IoT気象ステーションに接続できます。

これは、AIを搭載した低消費電力のガス、気圧、温度および湿度センサです。
この新しい BME688 センサには、以下のような追加機能や用途があります。
- 室内空気質の測定
- 揮発性硫黄化合物の測定による口臭や食品の腐敗検知(細菌増殖の指標)
- 異常なガスや臭気の検出(漏れなどの可能性)
- おむつの状態検知(乳児ケアなど)
- 臭気や悪臭の早期検知
Boschの BME 280 センサについては、リフロー工程や基板への実装方法について、メーカーが示す推奨事項とガイドラインに従ってください。これらに従わない場合、測定値が期待値からずれるなどの問題が発生する可能性があります。
どうぞ良い一日を!
Este articulo esta disponible en español aqui.
この記事のスペイン語版はこちらにあります。