Este artículo describe como crear una estación de meterología usando el sistema operativo Zephyr y la plataforma Nordic nRF54L15-DK

conectado a un sensor Adafruit BME280 Humidity + Barometric Pressure + Temperature Sensor Breakout Evaluation Board disponible en DigiKey.

El Adafruit BME280 Humidity + Barometric Pressure + Temperature Sensor Breakout Evaluation Board contiene un sensor Bosch BME 280 que en este caso se usa para comunicarse vía la interfaz de 4 lineas SPI a una frecuencia de 1 MHz. El Bosch BME 280 sensor se puede conectar via la interfaz I2C ya que esta plataforma tiene la provición QWIC (Por favor refierase al previo articulo Zephyr con interfaz I2C en caso de que esta interfaz sea usada). El sensor Adafruit BME280 Humidity + Barometric Pressure + Temperature Sensor Breakout Evaluation Board fue soldado a los terminales eléctricos y fue puesto en un “breadboard” similar a este disponible en DigiKey,

Las siguientes cables codificados en colores,

son usados para hacer interconeciones entre el breadboard y el Nordic nRF54L15-DK kit de desarrollo.
Antes de continuar este demo de Zephyr IoT de estación de meterología, por favor refierase al siguiente artículo que describe como instalar el “software” que se necesita para desarrollar en el sistema operativo Zephyr usando una computadora con Linux. Aquí esta la configuración usada con el Analizador Lógico de Sparkfun utilizado en este caso. (No la forma óptima debido a los cables extensos, etc.),
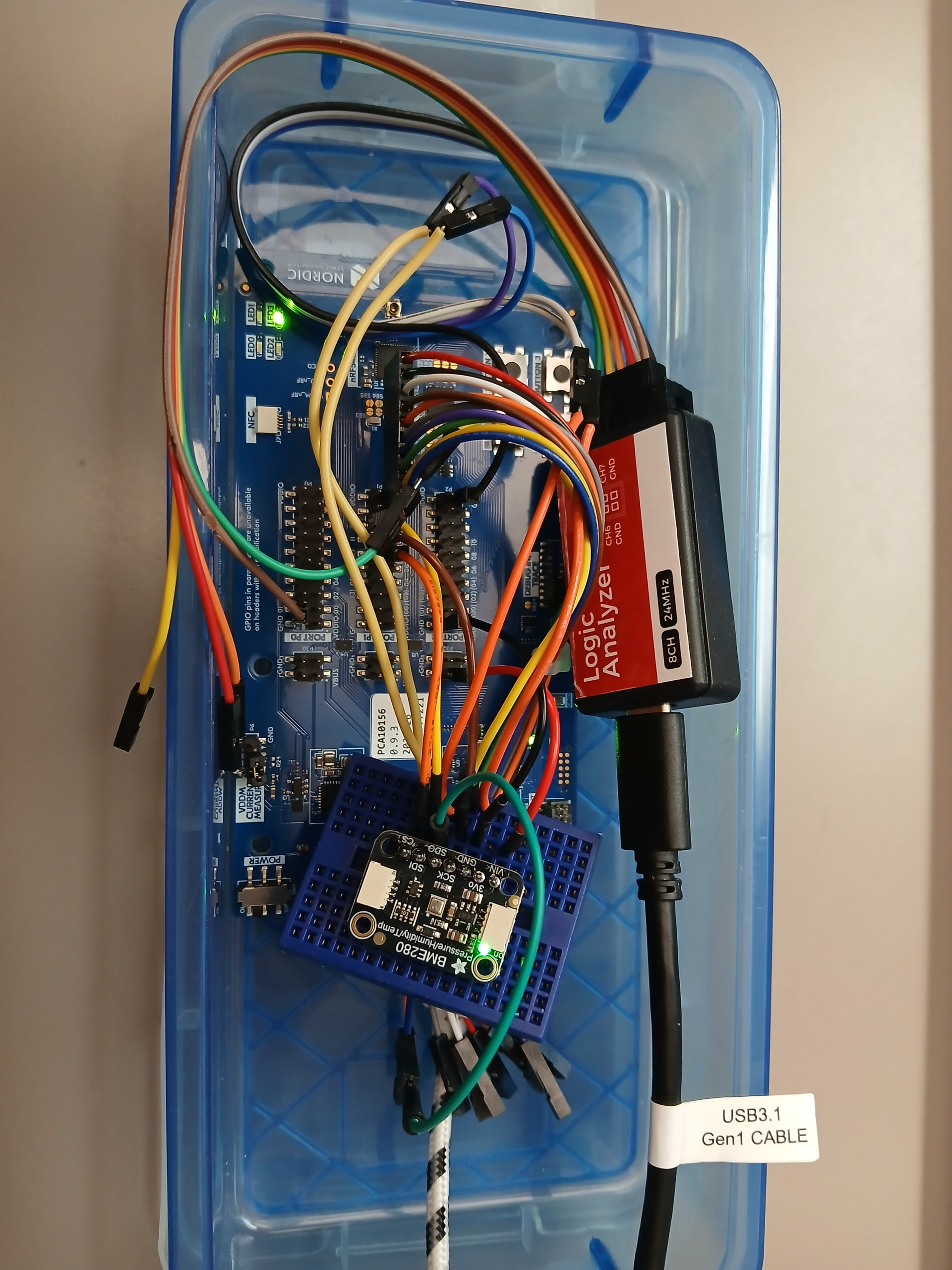
Las conecciones necesarias del interfaz de 4 lineas de SPI, mas la linea de fuente de voltage y la tierra para este demo son resumidas en la siguiente tabla,

Procedemos a crear el siguiente archivo de Zephyr llamado proj.conf dentro del directorio del projecto,
CONFIG_GPIO=y
CONFIG_CBPRINTF_FP_SUPPORT=y
CONFIG_SPI=y
CONFIG_LOG=y
Por el proceso estandarizado de Zephyr, entonces se procede a crear el archivo CMakeLists.txt dentro del directorio del projecto,
cmake_minimum_required(VERSION 3.20.0)
find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE})
project(spi)
target_sources(app PRIVATE src/main.c)
También se incluye el archivo “overlay” de Zephyr que define la interfaz de 4 lineas de SPI llamado en este caso nrf54l15dk_nrf54l15.overlay
&spi21 {
compatible = "nordic,nrf-spim";
status = "okay";
pinctrl-0 = <&spi21_default>;
pinctrl-1 = <&spi21_sleep>;
pinctrl-names = "default", "sleep";
cs-gpios = <&gpio1 8 GPIO_ACTIVE_LOW>;
bme280: bme280@0 {
compatible = "bosch,bme280";
reg = <0>;
spi-max-frequency = <1000000>; // 1MHz
};
};
/* STEP 2.2 - Change the pin configuration */
/* */
&pinctrl {
spi21_default: spi21_default {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 1, 11)>,
<NRF_PSEL(SPIM_MOSI, 1, 13)>,
<NRF_PSEL(SPIM_MISO, 1, 14)>;
};
};
spi21_sleep: spi21_sleep {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 1, 11)>,
<NRF_PSEL(SPIM_MOSI, 1, 13)>,
<NRF_PSEL(SPIM_MISO, 1, 14)>;
low-power-enable;
};
};
};
La siguiente aplicación de estación meterológica IoT definida en el archivo main.c va a leer los valores del sensor Adafruit BME280 Humidity + Barometric Pressure + Temperature Sensor Breakout Evaluation Board una vez por segundo, y parpadea un LED verde en la plataforma,
/*
* Copyright (c) 2024 Nordic Semiconductor ASAhttps://www.digikey.com/en/products/filter/lcd-oled-graphic/107?s=N4IgTCBcDaICYEsDOAHANgQwJ5JAXQF8g
*
* SPDX-License-Identifier: LicenseRef-Nordic-5-Clause
*/
#include <zephyr/kernel.h>
#include <zephyr/logging/log.h>
/* STEP 1.2 - Include the header files for SPI, GPIO and devicetree */
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/drivers/spi.h>
LOG_MODULE_REGISTER(DigiKey_Coffee_Cup, LOG_LEVEL_INF);
#define DELAY_REG 10
#define DELAY_PARAM 50
#define DELAY_VALUES 1000
#define LED0 13
#define CTRLHUM 0xF2
#define CTRLMEAS 0xF4
#define CALIB00 0x88
#define CALIB26 0xE1
#define ID 0xD0
#define PRESSMSB 0xF7
#define PRESSLSB 0xF8
#define PRESSXLSB 0xF9
#define TEMPMSB 0xFA
#define TEMPLSB 0xFB
#define TEMPXLSB 0xFC
#define HUMMSB 0xFD
#define HUMLSB 0xFE
#define DUMMY 0xFF
const struct gpio_dt_spec ledspec = GPIO_DT_SPEC_GET(DT_NODELABEL(led0), gpios);
/* STEP 3 - Retrieve the API-device structure */
#define SPIOP SPI_WORD_SET(8) | SPI_TRANSFER_MSB
struct spi_dt_spec spispec = SPI_DT_SPEC_GET(DT_NODELABEL(bme280), SPIOP, 0);
/* Data structure to store BME280 data */
struct bme280_data {
/* Compensation parameters */
uint16_t dig_t1;
int16_t dig_t2;
int16_t dig_t3;
uint16_t dig_p1;Bosch BME 280 sensor
int16_t dig_p2;
int16_t dig_p3;
int16_t dig_p4;
int16_t dig_p5;
int16_t dig_p6;
int16_t dig_p7;
int16_t dig_p8;
int16_t dig_p9;
uint8_t dig_h1;
int16_t dig_h2;
uint8_t dig_h3;
int16_t dig_h4;
int16_t dig_h5;
int8_t dig_h6;
/* Compensated values */
int32_t comp_temp;
uint32_t comp_press;
uint32_t comp_humidity;
/* Carryover between temperature and pressure/humidity compensation */
int32_t t_fine;
uint8_t chip_id;
} bmedata;
static int bme_read_reg(uint8_t reg, uint8_t *data, uint8_t size)
{
int err;
/* STEP 4.1 - Set the transmit and receive buffers */
uint8_t tx_buffer = reg;
struct spi_buf tx_spi_buf = {.buf = (void *)&tx_buffer, .len = 1};
struct spi_buf_set tx_spi_buf_set = {.buffers = &tx_spi_buf, .count = 1};
struct spi_buf rx_spi_bufs = {.buf = data, .len = size};
struct spi_buf_set rx_spi_buf_set = {.buffers = &rx_spi_bufs, .count = 1};
/* STEP 4.2 - Call the transceive function */
err = spi_transceive_dt(&spispec, &tx_spi_buf_set, &rx_spi_buf_set);
if (err < 0) {
LOG_ERR("spi_transceive_dt() failed, err: %d", err);
return err;
}
return 0;
}
static int bme_write_reg(uint8_t reg, uint8_t value)
{
int err;
/* STEP 5.1 - declare a tx buffer having register address and data */
uint8_t tx_buf[] = {(reg & 0x7F), value};
struct spi_buf tx_spi_buf = {.buf = tx_buf, .len = sizeof(tx_buf)};
struct spi_buf_set tx_spi_buf_set = {.buffers = &tx_spi_buf, .count = 1};
/* STEP 5.2 - call the spi_write_dt function with SPISPEC to write buffers */
err = spi_write_dt(&spispec, &tx_spi_buf_set);
if (err < 0) {
LOG_ERR("spi_write_dt() failed, err %d", err);
return err;
}
return 0;
}
void bme_calibrationdata(void)
{
/* Set data size of 3 as the first byte is dummy using bme_read_reg() */
uint8_t values[3];
uint8_t size = 3;
uint8_t regaddr;
LOG_INF("-------------------------------------------------------------");
LOG_INF("bme_read_calibrationdata: Reading from calibration registers:");
/* STEP 6 - We are using bme_read_reg() to read required number of bytes from
respective register(s) and put values to construct compensation parameters */
regaddr = CALIB00;
bme_read_reg(regaddr, values, size);
bmedata.dig_t1 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param T1 = %d", regaddr, size-1, bmedata.dig_t1);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_t2 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param Param T2 = %d", regaddr, size-1, bmedata.dig_t2);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_t3 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param T3 = %d", regaddr, size-1, bmedata.dig_t3);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p1 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P1 = %d", regaddr, size-1, bmedata.dig_p1);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p2 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P2 = %d", regaddr, size-1, bmedata.dig_p2);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p3 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P3 = %d", regaddr, size-1, bmedata.dig_p3);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p4 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P4 = %d", regaddr, size-1, bmedata.dig_p4);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p5 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P5 = %d", regaddr, size-1, bmedata.dig_p5);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p6 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P6 = %d", regaddr, size-1, bmedata.dig_p6);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p7 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P7 = %d", regaddr, size-1, bmedata.dig_p7);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p8 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P8 = %d", regaddr, size-1, bmedata.dig_p8);
k_msleep(DELAY_PARAM);
regaddr += 2;
bme_read_reg(regaddr, values, size);
bmedata.dig_p9 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param P9 = %d", regaddr, size-1, bmedata.dig_p9);
k_msleep(DELAY_PARAM);
regaddr += 3; size=2; /* only read one byte for H1 (see datasheet) */
bme_read_reg(regaddr, values, size);
bmedata.dig_h1 = (uint8_t)values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H1 = %d", regaddr, size-1, bmedata.dig_h1);
k_msleep(DELAY_PARAM);
regaddr += 64; size=3; /* read two bytes for H2 */
bme_read_reg(regaddr, values, size);
bmedata.dig_h2 = ((uint16_t)values[2])<<8 | values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H2 = %d", regaddr, size-1, bmedata.dig_h2);
k_msleep(DELAY_PARAM);
regaddr += 2; size=2; /* only read one byte for H3 */
bme_read_reg(regaddr, values, size);
bmedata.dig_h3 = (uint8_t)values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H3 = %d", regaddr, size-1, bmedata.dig_h3);
k_msleep(DELAY_PARAM);
regaddr += 1; size=3; /* read two bytes for H4 */
bme_read_reg(regaddr, values, size);
bmedata.dig_h4 = ((uint16_t)values[1])<<4 | (values[2] & 0x0F);
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H4 = %d", regaddr, size-1, bmedata.dig_h4);
k_msleep(DELAY_PARAM);
regaddr += 1;
bme_read_reg(regaddr, values, size);
bmedata.dig_h5 = ((uint16_t)values[2])<<4 | ((values[1] >> 4) & 0x0F);
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H5 = %d", regaddr, size-1, bmedata.dig_h5);
k_msleep(DELAY_PARAM);
regaddr += 2; size=2; /* only read one byte for H6 */
bme_read_reg(regaddr, values, 2);
bmedata.dig_h6 = (uint8_t)values[1];
LOG_INF("\tReg[0x%02x] %d Bytes read: Param H6 = %d", regaddr, size-1, bmedata.dig_h6);
k_msleep(DELAY_PARAM);
LOG_INF("-------------------------------------------------------------");
}
int bme_print_registers(void)
{
uint8_t buf[2];
uint8_t size = 2; /* size=2 as 1st byte is dummy using bme_read_reg() */
uint8_t data;
int err;
/* STEP 7 - Go through the following code and see how we are using
bme_read_reg() to read and print different registers (1-byte) */
/* Register addresses to read from (see the data sheet) */
uint8_t reg_id = ID;
uint8_t regs_morecalib[16];
uint8_t regs_more[12];
/* Set the register addresses */
regs_morecalib[0] = CALIB26;
for (uint8_t i=0; i<15; i++)
regs_morecalib[i+1] = regs_morecalib[i] + 1;
regs_more[0] = CTRLHUM;
for (uint8_t i=0; i<11; i++)
regs_more[i+1] = regs_more[i] + 1;
/* Read 1 byte data from each register and print */
LOG_INF("bme_print_registers: Reading all BME280 registers (one by one)");
err = bme_read_reg(reg_id, buf, size);
if (err < 0)
{
LOG_INF("Error in bme_read_reg(), err: %d", err);
return err;
}
data = buf[1];
bmedata.chip_id = data;
LOG_INF("\tReg[0x%02x] = 0x%02x", reg_id, data);
k_msleep(DELAY_REG);
/* Reading from more calibration registers */
for (uint8_t i = 0; i < sizeof(regs_morecalib); i++)
{
err = bme_read_reg(regs_morecalib[i], buf, size);
if (err < 0)
{
LOG_INF("Error in bme_read_reg(), err: %d", err);
return err;
}
data = buf[1];
LOG_INF("\tReg[0x%02x] = 0x%02x", regs_morecalib[i], data);
k_msleep(DELAY_REG);
}
/* Reading from more registers */
for (uint8_t i=0; i<sizeof(regs_more); i++)
{
err = bme_read_reg(regs_more[i], buf, size);
if (err < 0)
{
LOG_INF("Error in bme_read_reg(), err: %d", err);
return err;
}
data = buf[1];
LOG_INF("\tReg[0x%02x] = 0x%02x", regs_more[i], data);
k_msleep(DELAY_REG);
}
LOG_INF("-------------------------------------------------------------");
return 0;
}
/* STEP 8 - Go through the compensation functions and
note that they use the compensation parameters from
the bme280_data structure and then store back the compensated value */
static void bme280_compensate_temp(struct bme280_data *data, int32_t adc_temp)
{
int32_t var1, var2;
var1 = (((adc_temp >> 3) - ((int32_t)data->dig_t1 << 1)) *
((int32_t)data->dig_t2)) >> 11;
var2 = (((((adc_temp >> 4) - ((int32_t)data->dig_t1)) *
((adc_temp >> 4) - ((int32_t)data->dig_t1))) >> 12) *
((int32_t)data->dig_t3)) >> 14;
data->t_fine = var1 + var2;
data->comp_temp = (data->t_fine * 5 + 128) >> 8;
}
static void bme280_compensate_press(struct bme280_data *data, int32_t adc_press)
{
int64_t var1, var2, p;
var1 = ((int64_t)data->t_fine) - 128000;
var2 = var1 * var1 * (int64_t)data->dig_p6;
var2 = var2 + ((var1 * (int64_t)data->dig_p5) << 17);
var2 = var2 + (((int64_t)data->dig_p4) << 35);
var1 = ((var1 * var1 * (int64_t)data->dig_p3) >> 8) +
((var1 * (int64_t)data->dig_p2) << 12);
var1 = (((((int64_t)1) << 47) + var1)) * ((int64_t)data->dig_p1) >> 33;
/* Avoid exception caused by division by zero */
if (var1 == 0) {
data->comp_press = 0U;
return;
}
p = 1048576 - adc_press;
p = (((p << 31) - var2) * 3125) / var1;
var1 = (((int64_t)data->dig_p9) * (p >> 13) * (p >> 13)) >> 25;
var2 = (((int64_t)data->dig_p8) * p) >> 19;
p = ((p + var1 + var2) >> 8) + (((int64_t)data->dig_p7) << 4);
data->comp_press = (uint32_t)p;
}
static void bme280_compensate_humidity(struct bme280_data *data, int32_t adc_humidity)
{
int32_t h;
h = (data->t_fine - ((int32_t)76800));
h = ((((adc_humidity << 14) - (((int32_t)data->dig_h4) << 20) -
(((int32_t)data->dig_h5) * h)) + ((int32_t)16384)) >> 15) *
(((((((h * ((int32_t)data->dig_h6)) >> 10) * (((h *
((int32_t)data->dig_h3)) >> 11) + ((int32_t)32768))) >> 10) +
((int32_t)2097152)) * ((int32_t)data->dig_h2) + 8192) >> 14);
h = (h - (((((h >> 15) * (h >> 15)) >> 7) *
((int32_t)data->dig_h1)) >> 4));
h = (h > 419430400 ? 419430400 : h);
data->comp_humidity = (uint32_t)(h >> 12);
}
int bme_read_sample(void)
{
int err;
int32_t datap = 0, datat = 0, datah = 0;
float pressure_pa = 0.0f, temperature_c = 0.0f, humidity = 0.0f;
/* STEP 9.1 - Store register addresses to do burst read */
uint8_t regs[] = {PRESSMSB, PRESSLSB, PRESSXLSB, \
TEMPMSB, TEMPLSB, TEMPXLSB, \
HUMMSB, HUMLSB, DUMMY}; //0xFF is dummy reg
uint8_t readbuf[sizeof(regs)];
/* STEP 9.2 - Set the transmit and receive buffers */
struct spi_buf tx_spi_buf = {.buf = (void *)®s, .len = sizeof(regs)};
struct spi_buf_set tx_spi_buf_set = {.buffers = &tx_spi_buf, .count = 1};
struct spi_buf rx_spi_bufs = {.buf = readbuf, .len = sizeof(regs)};
struct spi_buf_set rx_spi_buf_set = {.buffers = &rx_spi_bufs, .count = 1};
/* STEP 9.3 - Use spi_transceive() to transmit and receive at the same time */
err = spi_transceive_dt(&spispec, &tx_spi_buf_set, &rx_spi_buf_set);
if (err < 0) {
LOG_ERR("spi_transceive_dt() failed, err: %d", err);
return err;
}
/* Put the data read from registers into actual order (see datasheet) */
/* Uncompensated pressure value */
datap = (readbuf[1] << 12) | (readbuf[2] << 4) | ((readbuf[3] >> 4) & 0x0F);
/* Uncompensated temperature value */
datat = (readbuf[4] << 12) | (readbuf[5] << 4) | ((readbuf[6] >> 4) & 0x0F);
/* Uncompensated humidity value */
datah = (readbuf[7] << 8) | (readbuf[8]);
/* Compensate values using given functions */
bme280_compensate_press(&bmedata,datap);
bme280_compensate_temp(&bmedata, datat);
bme280_compensate_humidity(&bmedata, datah);
/* Convert to proper format as per data sheet */
pressure_pa = (float)bmedata.comp_press/256.0f;
float pressure_in = 0.0002953f * pressure_pa;
temperature_c = (float)bmedata.comp_temp/100.0f;
float temperature_f = (1.8f*temperature_c) + 32.0f;
humidity = (float)bmedata.comp_humidity/1024.0f;
/* Print the uncompensated and compensated values */
LOG_INF("\tTemperature: \t uncomp = %d C \t comp = %8.2f C", datat, (double)temperature_c);
LOG_INF("\tTemperature: \t uncomp = %d C \t comp = %8.2f F", datat, (double)temperature_f);
LOG_INF("\tPressure: \t uncomp = %d Pa \t comp = %8.2f Pa", datap, (double)pressure_pa);
LOG_INF("\tPressure: \t uncomp = %d Pa \t comp = %8.2f in Hg", datap, (double)pressure_in);
LOG_INF("\tHumidity: \t uncomp = %d RH \t comp = %8.2f %%RH", datah, (double)humidity);
return 0;
}
int main(void)
{
int err;
err = gpio_is_ready_dt(&ledspec);
if (!err) {
LOG_ERR("Error: GPIO device is not ready, err: %d", err);
return 0;
}
/* STEP 10.1 - Check if SPI and GPIO devices are ready */
err = spi_is_ready_dt(&spispec);
if (!err) {
LOG_ERR("Error: SPI device is not ready, err: %d", err);
return 0;
}
gpio_pin_configure_dt(&ledspec, GPIO_OUTPUT_ACTIVE);
/* STEP 10.2 - Read calibration data */
bme_calibrationdata();
/* STEP 10.3 - Write sampling parameters and read and print the registers */
bme_write_reg(CTRLHUM, 0x04);
bme_write_reg(CTRLMEAS, 0x93);
bme_print_registers();
LOG_INF("Continuously read sensor samples, compensate, and display");
while(1){
/* STEP 10.4 - Continuously read sensor samples and toggle led */
bme_read_sample();
gpio_pin_toggle_dt(&ledspec);
k_msleep(DELAY_VALUES);
}
return 0;
}
En este momento los archivos y subdirectorio del projecto Zephyr debe ser como sigue,
|-- CMakeLists.txt
|-- nrf54l15dk_nrf54l15.overlay
|-- prj.conf
`-- src
|-- main.c
Ahora se procede a construir el projecto de Zephyr como sigue dentro del ambiente virtual de python,
digikey_coffee_cup (venv) $ west build -p always -b nrf54l15dk/nrf54l15/cpuapp -- -DEXTRA_DTC_OVERLAY_FILE=nrf54l15dk_nrf54l15.overlay
Finalmente se conecta via USB el kit de Nordic nRF54L15-DK programandolo así,
digikey_coffee_cup (venv) $ west flash
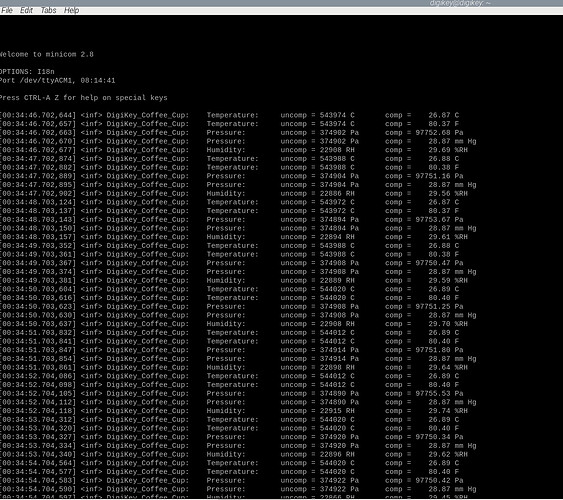
La aplicación de estación de meterología basada en el sistema operativo Zephyr IoT realiza la clásica compensación del Bosch BME 280 sensor durante la etapa de inicialización y entonces procede a leer los valores de temperatura, humedad relativa, la presión atmosférica del sensor y procede a parpadear un LED verde (via GPIO) en la plataforma una vez por segundo. Este programa también realiza una serie de conversiones para mostrar en formato de punto flotante los parémetros atmosféricos en distintas unidades. (Por esta razón CONFIG_CBPRINTF_FP_SUPPORT=y esta activo).
Ahora se procede a abrir un términal de minicom para poder observar los valores adquiridos por la plataforma de Nordic nRF54L15-DK como se muestra a continuación,
digikey_coffee_cup@digikey:~ $ minicom -D /dev/ttyACM1
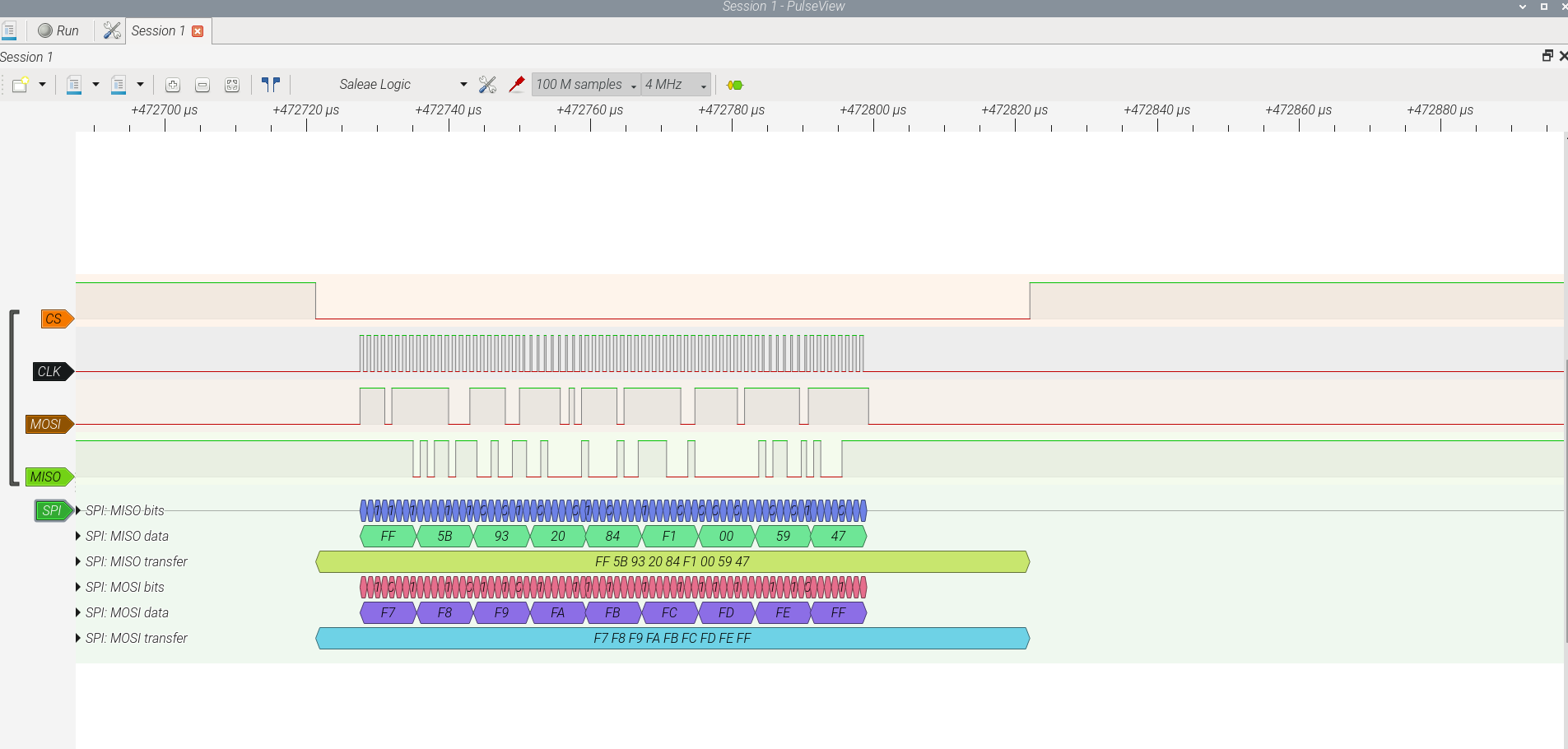
El Analizador Lógico de Sparkfun es usado en la interfaz de 4 lineas de SPI para monitorear estos mensajes como sigue a continuación. La primera imagen ilustra como estos mensajes estan presentes en la interfaz SPI durante el periodo de inicialización, compesación y lectura de los registros del artefacto,

Aqui se muestra una vista mas cercana a uno de los mensajes del interfaz de 4 lineas SPI (PRESSMSB, PRESSLSB, PRESSXLSB, TEMPMSB, TEMPLSB, TEMPXLSB, HUMMSB, HUMLSB, DUMMY) que son 9 Bytes una vez cada segundo pedidos por el kit Nordic nRF54L15-DK que esta corriendo la aplicación de Zephyr localizadas en las siguientes direcciones,
#define PRESSMSB 0xF7
#define PRESSLSB 0xF8
#define PRESSXLSB 0xF9
#define TEMPMSB 0xFA
#define TEMPLSB 0xFB
#define TEMPXLSB 0xFC
#define HUMMSB 0xFD
#define HUMLSB 0xFE
#define DUMMY 0xFF
se pueden ver claramente en la linea MOSI y los correspondientes 9 bytes recibidos en la linea MISO,
El kit de Nórdic nRF54L15-DK puede utilizarse para muchos projectos de IoT de estación de meterología donde los requisitos de consumo de energía son bien restringidos. El Nordic Power Profiler previamente descrito en el artículo aquí

se puede usar para caracterizar el consumo de energía del artefacto. El circuito integrado nRF52L15 esta disponible en DigiKey. Esta información de la estación meterológica Zephyr IoT puede mostrarse en en muchos displays que DigiKey tiene disponibles si es necesario. Un ejemplo de un display que ha sido bien popular es un clásico que se puede conectar via SPI o I2C.

entre otras opciones de displays presentes en DigiKey. El sensor Bosch BME 280 esta en otro kit disponible en Digikey conocido como el Sparkfun BME280,

Un sensor de velocidad del viento que se puede incluir en este projecto de estación de meterología de Zephyr IoT es el sensor de velocidad de viento de Adafruit precondicionado via el sistema SAADC del nRF52L15 (Cuyo voltaje varia entre 0.4V (viento de 0 m/s) hasta 2.0V (para un viento de 32.4m/s). (Ver previo artículo de Zephyr SAADC) disponible en Digikey.

Existen nuevos sensores de Bosch en DigiKey que se pueden conectar a esta estación de meterología Zephyr IoT tales como el BME688,

un sensor con inteligencia artificial (AI), digital de bajo consumo de energía, la detección de ciertos gases, la presión barométrica, la temperatura y la humedad relativa. Este sensor en particular denominado BME688 tiene mas funciones y posibles aplicaciones tales como,
- Medir la calidad del aire internamente dentro un area contenida
- Mal olor del aliento, detección de comida dañada basada en la medida de emisión de compuestos volatiles de sulfuro que estan correlacionados con crecimientos de bacterias
- Detección de gases y olores que no son normales, algunos de los cuales pueden indicar una especie de liqueo de una sustancia gaseosa
- Detección del estado del pañal de un bebé (ejemplo: el cuidado de un bebé)
- La temprana detección de malos olores
Por favor sigua la recomendaciones del manufacturero Bosch BME 280 sensor y los principios adecuados para completar el proceso de soldadura, considerar su montaje apropiado en un circuito impreso, ya que de no seguirse esto, puede causar desviaciones de las medidas adquiridas por el sensor entre otras consideraciones importantes bajo las cuales el funcionamiento apropiado puede terminar .
Que tenga un buen día
Este artículo esta disponible en inglés aqui
This article is also available in english here.