SPICEにおけるロードセルのモデリング - 次回のアナログビット →

Download Author’s Mathcad File (563.5 KB)
Download A Free Version of Mathcad
Download LTspice for Free
注1:本書で示されるすべての式において、R5 = R6 = Rs = 0とし、代数的な処理を行うと、単純な4つの抵抗ブリッジ構成(すなわちスパン補償抵抗なし)の等価式が得られます。
注2:Rinの計算では、信号出力に接続される負荷は、影響が無視できるほど高インピーダンスであることを前提としています。
任意の抵抗値に対する計算
ホイートストンブリッジの抵抗構成が必ずしも平衡でなく、励起電圧に直列の抵抗(スパン補償抵抗など)を追加する場合、入出力抵抗値の一般式の導出は次のようになります。このような特殊な現象にいつ遭遇するか分かりませんが、私は時々、代数におけるマゾヒストになるので、とりあえず皆さんのために計算をしてみました。

入力抵抗
励起電圧から見た入力抵抗を求めるのは比較的簡単で、基本的には見ただけで容易にわかります。


R1とR2は直列に接続され、R3とR4も同様に接続されています。両者の組み合わせが並列になり、その結果、4つのブリッジ抵抗の合成抵抗がR5およびR6と直列になります。
出力抵抗
出力のプラス側とマイナス側の信号の間に接続された任意の負荷から後方を見た出力抵抗を求めるのは、もう少し複雑です。励起電圧は短絡し、GNDは他のネットと同様に扱う必要があります。この後、R5とR6の直列接続を中央に配置して回路を描き直すと、R5+R6がR3、R4(または R1、R2ですが、どちらを選ぶかは任意です)とデルタ(またはパイ)型になっていることが図でイメージしやすくなります。

R3、R4、R5+R6をΔ→Y(π→Y)変換し、Ra、Rb、および RcをY接続にしたときの抵抗値として使用すると、容易に関係式を書くことができます。

これで、出力抵抗の式を、これらの変数で書くのがずっと簡単になりました・・・。

・・・そして、Ra、Rb、Rcを逆に代入して、式が元の抵抗で表された式になるようにします。

これはかなり見苦しい式で、「単純化」というのはしばしば言葉だけの議論ではありますが、私は最初の主要な分母を少し整理し、少し項を減らすことにしました。

R3 = R1、R4 = R2、R5 = R6 = Rsの場合の計算
これらの条件は、平衡したブリッジに当てはまります。平衡したブリッジの場合、R5とR6が含まれているとスパン補償抵抗になる可能性が高いので、これらを置き換えてRsとしました。上記の入出力抵抗の一般式にこれらを代入すると、結果が大幅に簡単になります。

入力抵抗

この結果もまた、容易に確認することができます。
出力抵抗

この時点で代数には怠惰さを感じていたので、TI-89の記号式ソルバーでRoutの式を簡単にしてもらっただけですが(Mathcadの無料版では記号式ソルブはできません)、その結果を実際の回路と比較して、より直感的にわかるように少しアレンジしてみました。TI-89のアルゴリズムは、どんな小さな引き算の分数でも、可能な限り大きな分子/分母になるような掛け算になるよう努力しているようです。

上記Routの式で、分母が実は Rinであることに気がつきます。
一般的なロードセルについての計算
ここで、完全に平衡の取れたホイートストンブリッジの実用化について考えてみるのも有効です。ロードセルがこのように動作するよう作られていることは知っているので、ロードセルの例を使用していますが、他の種類のセンサで同じ理屈が通用しても不思議ではありません。 センサが、完全に平衡の取れたセンシング素子を左右対称の相補型に配置したホイートストンブリッジを使用している限り、それは可能です。
完全な平衡および左右対称的に相補とは、以下の条件を満たしていることです。
-
感知している物理的特性が校正されたゼロ点にあるとき、Ro = R1 = R2 = R3 = R4です(一般的なロードセルでは、印加された力がゼロのときに校正されたマッチドペアの歪ゲージが使用されます)。
-
R1とR3は、感知している物理的特性が変化すると、R2とR4とは逆方向に等しく変化します(例えば、R1とR3がある抵抗値Rfだけ増加すると、R2とR4はRfだけ減少します)。
つまり、感知している物理的特性がセンサの設計範囲内であれば、常にRo+Rf = R1 = R3、Ro-Rf = R2 = R4と言えます。ロードセルの場合、Rfは印加された力による各歪ゲージの抵抗値の変化になります。

これらを先ほどのRinとRoutの式に代入すると、式はさらに簡単になります。
入力抵抗

この場合のRinはRfに依存しないことに注意してください(つまり、左右対称の相補平衡型ロードセルの入力抵抗は、力が加わっても変化しません)。
出力抵抗

上のRoutの式で、分母が実は Rinであることにもう一度注目してください。
力がゼロの場合(すなわちRf = 0 )の平衡の取れたロードセルのようにR1 = R2 = Roとみなせる場合、出力抵抗の式はさらに簡単になります。

またもう1つの式で、Rf = 0とすることで、同じ結果を得ることができます。

従って、出力抵抗は単純に平衡の取れた静止状態の歪ゲージ抵抗Roとなります。これがロードセルのデータシートに記載されている代表的な出力抵抗の値です。
計算の確認にSPICEを利用する
ある種のSPICEプログラム(私はLTspiceを使いました)を使えば、さまざまな状況における上記の式が正しいことを簡単に確認することができます。DCテスト電流を使用して回路の2点間の抵抗値を決定できるオームの法則の簡単なアプリケーション技法を覚えておいて、SPICEプログラムを使用して任意の電流を供給するだけです。物理的に爆発したり発火したりすることはありません。単純な1Aの電流源を使い、そのマイナス端子を常に回路のGNDとして選択すると、プラス端子の電圧は、上記のすべての状況について以下に示すように、オームで表した抵抗値になります。SPICEで理想的な電流源を作ると、必要な出力電圧を奇跡的に瞬時に得ることができますよね?また、私はさまざまな抵抗器にかなり風変わりな値を使用しているので、気にしないでください。すぐにチェックできるよう、都合の良いようにしただけです。
任意の抵抗値の場合
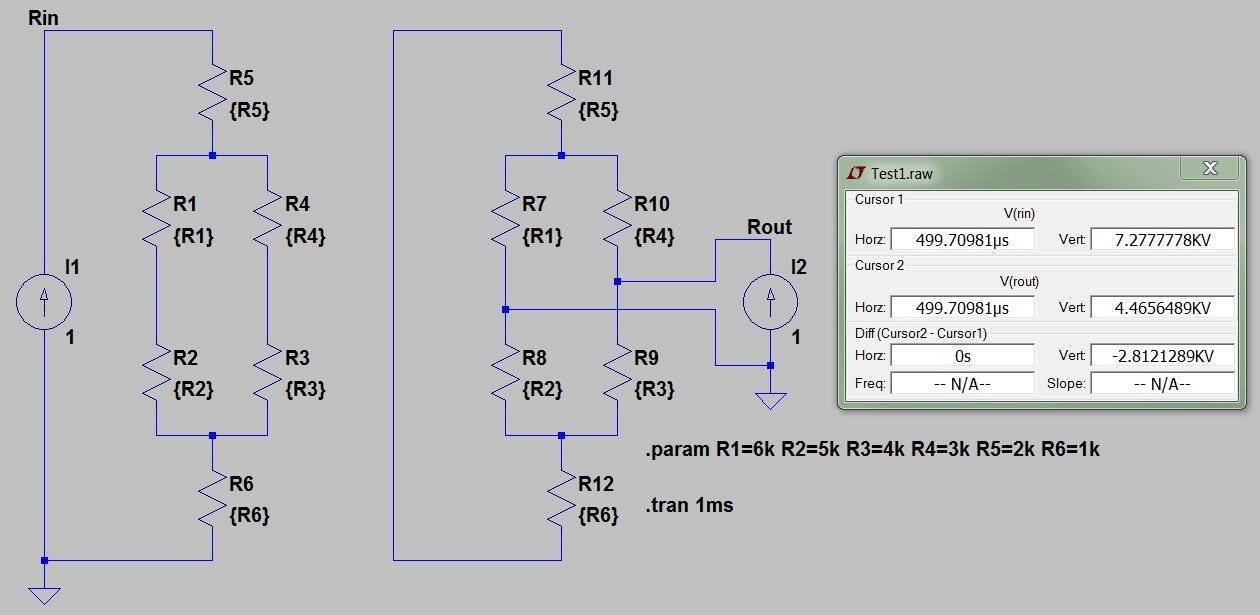

Ltspiceのファイル - Test1.asc (2.1 KB)
R3 = R1、R4 = R2、R5 = R6 = Rsの場合


LTspiceのファイル - Test2.asc (2.1 KB)
代表的なロードセルの場合


LTspiceのファイル - Test3.asc (2.1 KB)
ゼロ負荷における代表的なロードセルの場合(Rf = 0の場合)


LTspiceのファイル - Test4.asc (2.1 KB)


