パーク変換はACモータのフィールドオリエンテッド制御(FOC)の中核となるアルゴリズムです。パーク変換の本質は、静止座標系のAC電流を同期回転座標系に投影し、安定に制御できるDC成分に変換することにあります。この変換により、ACモータをDCモータのように精密に制御することが可能となり、高性能モータ制御(電気自動車や産業用駆動装置など)の基礎となります。
PMSM用センサレスフィールドオリエンテッド制御(FOC)のコアロジックフレームワーク

(出典:Microchip)
1. パーク変換の原理
パーク変換はフィールドオリエンテッド制御(FOC) の中核をなすステップで、ACモータの精密制御の問題を解決します。
- ACからDCへの変換: αβ軸の正弦波AC電流をdq軸の一定のDC電流に変換し、 PI制御(DC信号の静的エラーなしの追跡を可能にする)により電流を正確に制御します。
- 非干渉制御:
- Id はモータの鎖交磁束を調整する役割を果たします(たとえば、永久磁石同期モータ(PMSM)では、Id によってトルクを最大化する制御が可能です)。
- Iq はモータのトルクを直接決定します(Iq はトルクに比例し、速度制御の中核となります)。デカップリング後、鎖交磁束とトルクは相互に干渉することなく独立して制御することができます。
以下の図は、数式とベクトル図によってパーク変換の原理を説明しています。
パーク変換の原理を示すブロック図
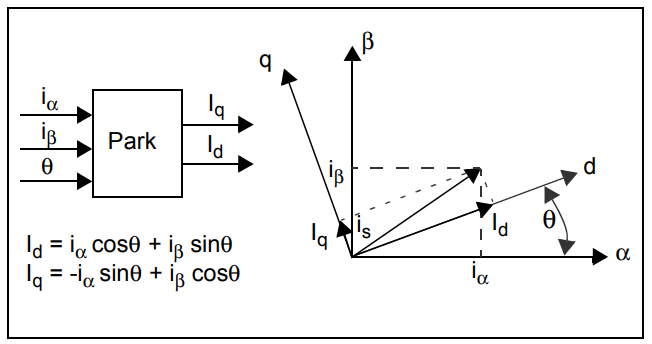
(出典:Microchip)
右側のベクトル図は、現在のベクトルの投影プロセスを直感的に示しています。
- is:ステータ電流の空間ベクトル(その大きさは電流の実効値に等しく、その方向は電気周波数に等しい周波数で時間とともに回転します)。
- iα、iβ:is のα軸とβ軸への静止投影(これらは is と共に回転し、常に正弦波AC電流となります)。
- Id、Iq:is の同期回転するd軸、q軸への投影:
- dq軸はローターに同期して回転するので、モータが定常状態(一定速度)で動作すれば、Id と Iq は一定のDC量になります(これがパーク変換の核心の値です!)。
2. パーク変換の座標系の背景:αβ(静止)とdq(回転)
-
αβ座標系: モータのステータに固定さ れている静止座標系
- α軸はステータのA相巻線の軸と一致しています。
- β軸はα軸より電気角90°(反時計回り方向に)進相しており、2次元平面を形成しています。ステータ電流ベクトルのαβ軸上への投影は iα(α軸成分)と iβ(β軸成分)であり、これらは時間とともに正弦波状に変化するAC電流です(モータの電気周波数に等しい周波数)。
-
dq座標系: モータのローターに固定されている同期回転座標系
- d軸は通常、ローターの鎖交磁束の方向と一致します(例えば、PMSMではd軸は永久磁石によって生成される主鎖交磁束と一致し、誘導モータでは、d軸はステータの鎖交磁束と一致します)。
- q軸はd軸より電気角90°(反時計回り方向)進相し、ローターに同期して回転します(回転角速度はローターの電気角速度 ωe に等しい)。dq軸の回転角度は電気角θで表されます。θはd軸とα軸の間の角度です(θ = ωet に従って時間と共に変化します)。
3. パーク変換の数式:αβからdqへ
図の左側の数式は、変換関係を定義しています。

- 物理的な意味: 静止したαβ軸の電流 iα と iβ を同期回転するdq軸に投影し、d軸電流 Idとq軸電流 Iq を生成します。
- 式を導き出す方法(幾何学的投影): d軸を例にとると以下のようになります。
- iαcosθ:iα(α軸電流)のd軸への投影
- iβsinθ:iβ (β軸電流)のd軸への投影(β軸とα軸のなす角は90°であるため、β軸とd軸のなす角は(90°-θ)となり、投影は iβcos(90°−θ) = iβsinθ となります)。q軸の導出も同様です。負の符号はq軸の方向に由来します。θ=0 のとき、q軸はβ軸と一直線上にあります。Iq の式にθ=0を代入して確認すると、Iq = −iα⋅0 + iβ⋅1 = iβ となり、予想される結果と一致します。
要約: パーク変換がなければ、ACモータの電流は高周波交流であり、PI制御で安定的に制御することはできません。パーク変換があれば、ACモータ(永久磁石同期モータ(PMSM)や誘導モータ(IM)など)は、DCモータと同様に「正確に」制御することができます。
関連製品
関連アプリケーションノート
FOCに関する他の資料
- なぜDSPを使用して三相永久磁石同期モータ(PMSM)を制御するのでしょうか?
- 3つのモータ制御技術の比較:FOC、V/f制御、台形波6ステップ制御(BLDC)
- なぜフィールドオリエンテッド制御(FOC)を使うのでしょうか?
- フィールドオリエンテッド制御(FOC)アルゴリズムにおけるクラーク変換とは何でしょうか?
- フィールドオリエンテッド制御(FOC)アルゴリズムにおけるパーク変換とは何でしょうか?
- なぜPLL(位相同期回路)はマルチレベル速度サンプリングにおいて干渉防止と高精度を確保できるのでしょうか?