Q:Microchipはeバイク(電動アシスト自転車)にどのMCU(マイクロコントローラ)を使用し、またどのようにしてリアルタイムのモータ制御と通信の作業分担を実現しているのですか?
A:現在のソリューションでは、Microchipの第4世代DSC製品(例:dsPIC33CK256MP505 )を採用しています。ただし、具体的なピン数やペリフェラルの使用数はお客様の要件により異なりますが、MCUコア自体は変わりません。dsPIC33CK のメイン周波数は200MHz(100 MIPS)であり、完全な磁界方向制御(FOC)アルゴリズムの実行にはわずか十数マイクロ秒しかかかりません。これにより、通信タスクに充てられる十分なアイドル時間が確保されます。
どのようにしてリアルタイムでモータ制御と通信の作業を分担するのですか?
Microchipの dsPIC33CK シリーズ(例:dsPIC33CK256MP505 )は、MCUの汎用制御機能とDSPの高速演算能力を組み合わせたデジタル信号コントローラ(DSC)の一種であり、これにより、特にリアルタイムモータ制御に適しています。
なぜ1つの dsPIC33CK で十分なのですか?
- dsPIC33CK は、メイン周波数が200MHz、演算性能が100MIPSとなっています。
- 完全なFOCアルゴリズムの実行にはわずか十数マイクロ秒しかかかりません。これは制御ループの実行時間占有率が非常に低く、他のタスク処理のための時間が確保されることを意味します。
- FOCアルゴリズムが占める時間が短いため、MCUは追加のコプロセッサを必要とせず、同一チップ内で制御タスクと通信タスクの両方を処理することができます。
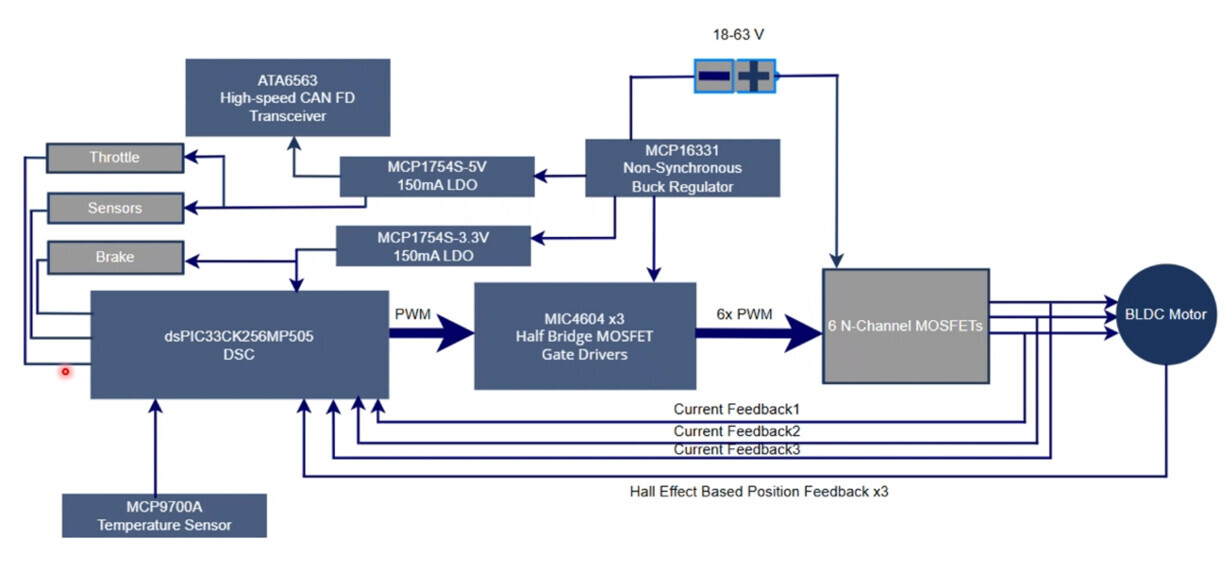
電動アシスト自転車(eバイク)用モータ制御システムのブロック図
システムのコアロジック(ブロック図 + アプリケーションシナリオ)
機能目標
電動アシスト自転車の精密なモータ制御を実現し、手動モード、電動モード、ペダルアシストモードなどの運転モードをカバーします。効率的な走行(FOCアルゴリズム)、短時間加速(磁界弱め制御技術)、エネルギー回収(回生ブレーキ)をサポートし、都市部での通勤や坂道走行などさまざまな状況にも対応が可能です。また、走行データの記録用にオンボードフラッシュメモリを搭載しています。
信号の流れ(指令からモータ駆動まで)
- 入力コマンド: スロットル(アクセル/速度調整)、ブレーキ(制動)、およびセンサ(例:温度センサ MCP9700A 、ホール電流センサ、ならびにセンサベースのFOCに必要な位置センサで、ホール式、磁気エンコーダ、誘導式、レゾルバ式などをサポートします)からの入力は、DSC(デジタル信号コントローラ)の dsPIC33CK256MP505 によって処理されます。
- 制御計算: DSCはFOCなどのアルゴリズムを実行し、MIC4604 ハーフブリッジゲートドライバへPWM信号を出力します。これにより6つのMOSFETを駆動し、最終的にブラシレスDC(BLDC)モータを制御します。
- 電源供給と通信: MCP16331 バックレギュレータは18~63Vの入力電圧を低電圧に変換し、LDOの MCP1754S は5V/3.3Vを出力して制御回路に電力を供給します。ATA6563 CAN FDトランシーバは高速通信(例:駆動データ、故障フィードバック)を実現します。

FOCに関連するその他のコンテンツ
関連製品:
- デジタル信号コントローラ(DSC):dsPIC33CK256MP508
- ゲートドライバ:MIC4104YM
- DC-DCコンバータ:MIC2129
- レギュレータ:MCP16301HT
- 低ドロップアウトレギュレータ(LDO):MCP1826ST-3302E/DB
- CANトランシーバ:MCP2561-E/SN
- シリアルフラッシュ:SST25PF040C-40E
- 電流リミッタ:MIC2091-1YM5-TR
- コンパレータ:MCP6569T-E/ST
- シャント電圧リファレンス:LM4040CYM3-2.5-TR
- オペアンプ:MCP651ST-E/OT
その他の関連するMicrochipのeバイク技術のQ&A:
- Microchipのeバイク技術に関するQ&A:どのようにしてリアルタイムのモータ制御と通信の作業を分担しているのですか?
- Microchipのeバイク技術に関するQ&A:どのようにしてEVの速度は検出され、制御されるのですか?
- Microchipのeバイク技術に関するQ&A:eバイクのアーキテクチャスキームはどのようなものですか?
- Microchipのeバイク技術に関するQ&A:どのようにして速度計測における干渉対策とデータ精度を確保するのですか?
- Microchipのeバイク技術に関するQ&A:どのようにしてFOC制御はバッテリ電圧と電流を管理するのですか?
- Microchipのeバイク技術に関するQ&A:どのようにしてeバイクの熱暴走を防止するのですか?
- Microchipのeバイク技術に関するQ&A:どのようにしてハードウェアアクセラレーションを実現するのですか?
- Microchipのeバイク技術に関するQ&A:どのようにしてeバイクのストールをハードウェア検出で防いでいるのですか?
- Microchipのeバイク技術に関するQ&A:安定性を確保するために監視が必要なものは何ですか?
- Microchipのeバイク技術に関するQ&A:eバイクの位置検出システムの電源供給が中断されることはありますか?
- Microchipのeバイク技術に関するQ&A:どのようなコンポーネントが提供されていますか?