Q:速度のマルチレベルサンプリング(multi-level sampling)が必要な場合、速度計測における適切な干渉抑制性能とデータ精度をどのようにして確保するのですか?
A:高次フィルタリングアルゴリズムや位相ロックループ(PLL)ソリューションを採用します。
なぜマルチレベル速度サンプリングは干渉の問題を引き起こすのですか?
マルチレベルサンプリング(またはマルチレートサンプリング)とは、同一制御システム内で速度信号が異なる周波数で収集または処理されるシナリオを指します。センサレス制御においては、速度信号はモータモデルと観測アルゴリズムを介して推定されますが、これらは電気ノイズ、PWMリップル、および電流サンプリング誤差などの干渉を本質的に含んでいます。
これらの「ノイズの多い」速度推定値を直接制御器に入力すると、特にマルチレベルサンプリングの低周波ループにおいて、ノイズが増幅または蓄積され、制御が不安定になる恐れがあります。
高次フィルタリングアルゴリズムの役割
高次フィルタ(2次ローパスフィルタ、カルマンフィルタ、スライディングモードフィルタなど)は、速度のダイナミック特性を維持しつつ、高周波ノイズを効果的に抑制することが可能です。
- カットオフ周波数は、PWMおよび高周波リップルノイズを除去するのに十分低く設定する必要があります。
- 遅延は、制御システムの反応を鈍らせる位相遅れが生じない程度に十分に小さくする必要があります。
マルチレベル速度サンプリングにおけるPLL(位相ロックループ)の耐干渉性能と精度
PLL(位相ロックループ)のブロック図には、通常、3つの主要なモジュールが含まれます。
位相検出器(PD)、ループフィルタ(LF)、および電圧制御発振器(VCO)です。特定のシナリオにおいては、周波数分割器または信号前処理ユニットを追加する場合があります。その中核となるロジックは、閉ループフィードバックを通じて「入力信号の周波数/位相」と「出力信号の周波数/位相」の正確な同期を実現することにあります。
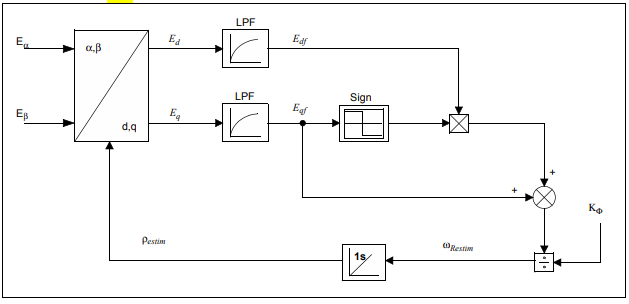
画像出典:Microchip
PLLモジュールの機能
- 位相検出器(PD): 推定されたローター位置と観測された電圧信号の位相を比較します。
- ループフィルタ(LF): ローパスフィルタとして機能し、高周波ノイズを除去します。
- 電圧制御発振器(VCO)または積分器: フィルタ処理された出力に基づいて、速度と位置の推定値を調整します。
PLL(位相ロックループ)の中核となるロジックは、閉ループフィードバックを通じて「入力信号の周波数/位相」と「出力信号の周波数/位相」の正確な同期を実現することにあります。
FOCに関連するその他のコンテンツ
関連製品:
- デジタル信号コントローラ(DSC):dsPIC33CK256MP508
- ゲートドライバ:MIC4104YM
- DC-DCコンバータ:MIC2129
- レギュレータ:MCP16301HT
- 低ドロップアウトレギュレータ(LDO):MCP1826ST-3302E/DB
- CANトランシーバ:MCP2561-E/SN
- シリアルフラッシュ:SST25PF040C-40E
- 電流リミッタ:MIC2091-1YM5-TR
- コンパレータ:MCP6569T-E/ST
- シャント電圧リファレンス:LM4040CYM3-2.5-TR
- オペアンプ:MCP651ST-E/OT
その他の関連するMicrochipのeバイク技術のQ&A:
- Microchipのeバイク技術に関するQ&A:どのようにしてリアルタイムのモータ制御と通信の作業を分担しているのですか?
- Microchipのeバイク技術に関するQ&A:どのようにしてEVの速度は検出され、制御されるのですか?
- Microchipのeバイク技術に関するQ&A:eバイクのアーキテクチャスキームはどのようなものですか?
- Microchipのeバイク技術に関するQ&A:どのようにして速度計測における干渉対策とデータ精度を確保するのですか?
- Microchipのeバイク技術に関するQ&A:どのようにしてFOC制御はバッテリ電圧と電流を管理するのですか?
- Microchipのeバイク技術に関するQ&A:どのようにしてeバイクの熱暴走を防止するのですか?
- Microchipのeバイク技術に関するQ&A:どのようにしてハードウェアアクセラレーションを実現するのですか?
- Microchipのeバイク技術に関するQ&A:どのようにしてeバイクのストールをハードウェア検出で防いでいるのですか?
- Microchipのeバイク技術に関するQ&A:安定性を確保するために監視が必要なものは何ですか?
- Microchipのeバイク技術に関するQ&A:eバイクの位置検出システムの電源供給が中断されることはありますか?
- Microchipのeバイク技術に関するQ&A:どのようなコンポーネントが提供されていますか?